Download
1 / 19
200 likes | 458 Views
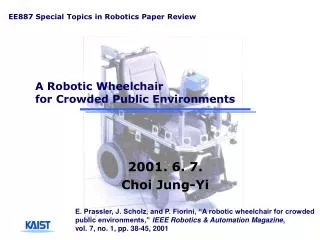
EE887 Special Topics in Robotics Paper Review. A Robotic Wheelchair for Crowded Public Environments. 2001. 6. 7. Choi Jung-Yi. E. Prassler, J. Scholz, and P. Fiorini, “A robotic wheelchair for crowded public environments,” IEEE Robotics & Automation Magazine ,

E N D
EE887 Special Topics in Robotics Paper Review A Robotic Wheelchair for Crowded Public Environments 2001. 6. 7. Choi Jung-Yi E. Prassler, J. Scholz, and P. Fiorini, “A robotic wheelchair for crowded public environments,” IEEE Robotics & Automation Magazine, vol. 7, no. 1, pp. 38-45, 2001
Overview • Two difficult situations of using wheelchair • Form conversations with the user community • Navigation in • NARROW & CLUTTERED environments • WIDE & CROWDED areas • MAid (Mobility Aid for Elderly and Disabled People) Combines • Narrow Area Navigation (NAN) Behavior Semiautonomous Navigation Mode • Wide Area Navigation (WAN) Behavior Autonomous Navigation Mode
Hardware Design • Mechanical Part • Rear wheels : two differentially driven • Front wheels : two passive castor • Maximum speed : 6 km/h (Powered by 12 V battery)
Hardware Design • Central Processing • Industrial PC(Pentium 166 MHz) + QNX • Sensors • Dead-reckoning system : wheel encoders + optical fiber gyroscope • 3 x 8 Ultrasound transducers and microcontrollers • Short-range sensing : two infrared scanners • 2-D laser range-finder
Control Architecture • WAN : Hierarchical Control Architecture Strategic Level Tactical Level Basic Control Level
Desired velocity vector Actual value computed by dead-reckoning Desired velocity Basic Control Level
Tactical Level (Overview) • The core of WAN Module • Motion Detection • Motion Tracking & Obstacle Velocity Estimation • Computation of the Evasive Maneuvers
Tactical Level (Overview) cont’d • Monitoring the surrounding environment • Detect the environment objects • Identify stationary / moving object Sonar system Laser range finder Estimate the speed and direction of the object Past trajectory and velocity Determine if MAid is moving on s collision course with objects Compute the avoidance maneuver
Strategic Level • Main task • Navigating in crowded area • Reaching a specific goal • Without any intermediate goal • Selection the nest motion goal by the user • Strategic level will be expended by including a path planner capable of adding the computation of subgoal sequences
Motion Detection and Tracking • A sequence of single observation • Investigating where these observations differ from each other • Discrepancy potential change • Occupancy Grid Representation • A projection of the range data on a 2-D rectangular grid • Grid element a small region of the real world • Updating every cell time consuming process
Time Stamp Map • Modification of occupancy grid representation • Map only cells observed as occupied • Cell coinciding with the range measurement • All other cells left untouched • Range image 200 x 200 time stamp map • Takes 1.5 msec on a Pentium 166 MHz
Motion Detection Algorithm • Based on a simple heuristic • Cell is occupied • by a stationary object if corresponding cells in TSMt and TSMt-1 carry time stamps. • By a moving object if corresponding cells in TSMt carry a time stamp different from TSMt-1 or no no time stamp at all. • TSMt : Time Stamp Map at time t
Motion History • Objects are represented by cell ensembles in the sensor map. • Identifying the object in a sequence of maps • Correspondence between objects using a nearest-neighbor criterion based on a Euclidean distance • The ensembles describes the same object if the distance to the nearest neighbor is smaller than a certain threshold. • Threshold • For stationary object : 30cm • For moving object : 1 m
Motion Planning • For simplicity • Model the wheelchair and the obstacles as circles. Planar problem with no rotations obstacle Wheelchair
Velocity Obstacle • VO of A with respect to B • Identifying the set of velocities of A causing a collision with the obstacle B at some time • To avoid collision : selecting the tip of VA outside VO
Velocity Obstacle Collision Cone Velocity Obstacle (cont’d) • Collision Cone v.s. Velocity Obstacle • Avoiding multiple obstacles : • Prioritization among Vos
Velocity Obstacle (cont’d) • Consideration of wheelchair dynamics • Some heuristics for making trajectory Reachable Avoidance Velocity Velocity Obstacle Reachable Velocity Toward Goal Maximum Velocity Structure
Experiments in Real Situations • Roaming in a Railway Station • Hall size : 20 x 40 m2 • Several tens of people • Survived about 18 hours • Hannover Fair ’98 • Survived more than 36 hours