Download
1 / 1
10 likes | 155 Views
PRELIMINARY ANALYSIS OF INTERPLANETARY TRAJECTORIES WITH AEROGRAVITY AND GRAVITY ASSIST MANOEUVRES Stefano M. Pessina, Politecnico di Milano university, Milan, Italy; stepex@tin.it Stefano Campagnola , ESA/ESOC - Mission Analysis Office, Darmstadt, Germany; Stefano.Campagnola@esa.int

E N D
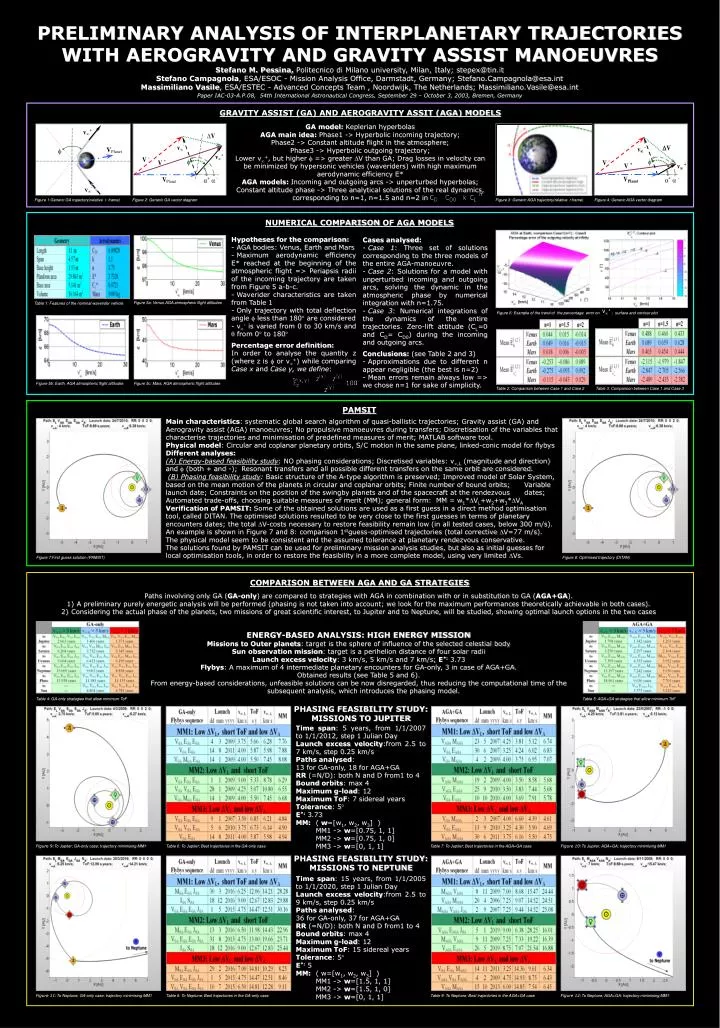
PRELIMINARY ANALYSIS OF INTERPLANETARY TRAJECTORIES WITH AEROGRAVITY AND GRAVITY ASSIST MANOEUVRES Stefano M. Pessina, Politecnico di Milano university, Milan, Italy; stepex@tin.it Stefano Campagnola, ESA/ESOC - Mission Analysis Office, Darmstadt, Germany; Stefano.Campagnola@esa.int Massimiliano Vasile, ESA/ESTEC - Advanced Concepts Team , Noordwijk, The Netherlands; Massimiliano.Vasile@esa.int Paper IAC-03-A.P.08, 54th International Astronautical Congress, September 29 – October 3, 2003, Bremen, Germany GRAVITY ASSIST (GA) AND AEROGRAVITY ASSIT (AGA) MODELS GA model: Keplerian hyperbolas AGA main idea: Phase1 -> Hyperbolic incoming trajectory; Phase2 -> Constant altitude flight in the atmosphere; Phase3 -> Hyperbolic outgoing trajectory; Lower v+, but higher => greater V than GA; Drag losses in velocity can be minimized by hypersonic vehicles (waveriders) with high maximum aerodynamic efficiency E* AGA models: Incoming and outgoing arcs -> unperturbed hyperbolas; Constant altitude phase -> Three analytical solutions of the real dynamics, corresponding to n=1, n=1.5 and n=2 in Figure 1:Generic GA trajectory(relative r. frame) Figure 2: Generic GA vector diagram Figure 3: Generic AGA trajectory(relative r.frame) Figure 4: Generic AGA vector diagram NUMERICAL COMPARISON OF AGA MODELS • Hypotheses for the comparison: • AGA bodies: Venus, Earth and Mars • Maximum aerodynamic efficiency E* reached at the beginning of the atmospheric flight => Periapsis radii of the incoming trajectory are taken from Figure 5 a-b-c. • Waverider characteristics are taken from Table 1 • Only trajectory with total deflection angle less than 180° are considered • v- is varied from 0 to 30 km/s and from 0° to 180° • Percentage error definition: • In order to analyse the quantity z (where z is or v+) while comparing Case x and Case y, we define: • Cases analysed: • Case 1: Three set of solutions corresponding to the three models of the entire AGA-manoeuvre. • Case 2: Solutions for a model with unperturbed incoming and outgoing arcs, solving the dynamic in the atmospheric phase by numerical integration with n=1.75. • Case 3: Numerical integrations of the dynamics of the entire trajectories. Zero-lift attitude (CL=0 and CD= CD0) during the incoming and outgoing arcs. • Conclusions:(see Table 2 and 3) • Approximations due to different n appear negligible (the best is n=2) • Mean errors remain always low => we chose n=1 for sake of simplicity. Figure 5a: Venus,AGA atmospheric flight altitudes Table 1: Features of the nominal waverider vehicle Figure 6: Example of the trend of the percentage error on v+; surface and contour plot Figure 5b: Earth, AGA atmospheric flight altitudes Figure 5c: Mars, AGA atmospheric flight altitudes Table 2: Comparison between Case 1 and Case 2 Table 3: Comparison between Case 1 and Case 3 PAMSIT Main characteristics: systematic global search algorithm of quasi-ballistic trajectories; Gravity assist (GA) and Aerogravity assist (AGA) manoeuvres; No propulsive manoeuvres during transfers; Discretisation of the variables that characterise trajectories and minimisation of predefined measures of merit; MATLAB software tool. Physical model: Circular and coplanar planetary orbits, S/C motion in the same plane, linked-conic model for flybys Different analyses: (A) Energy-based feasibility study: NO phasing considerations; Discretised variables: v,L (magnitude and direction) and (both + and -); Resonant transfers and all possible different transfers on the same orbit are considered. (B) Phasing feasibility study: Basic structure of the A-type algorithm is preserved; Improved model of Solar System, based on the mean motion of the planets in circular and coplanar orbits; Finite number of bound orbits; Variable launch date; Constraints on the position of the swingby planets and of the spacecraft at the rendezvous dates; Automated trade-offs, choosing suitable measures of merit (MM); general form: MM = w1*VL+w2+w3*VA Verification of PAMSIT: Some of the obtained solutions are used as a first guess in a direct method optimisation tool, called DITAN. The optimised solutions resulted to be very close to the first guesses in terms of planetary encounters dates; the total V-costs necessary to restore feasibility remain low (in all tested cases, below 300 m/s). An example is shown in Figure 7 and 8: comparison 1stguess-optimised trajectories (total corrective V=77 m/s). The physical model seem to be consistent and the assumed tolerance at planetary rendezvous conservative. The solutions found by PAMSIT can be used for preliminary mission analysis studies, but also as initial guesses for local optimisation tools, in order to restore the feasibility in a more complete model, using very limited Vs. Figure 7:First guess solution (PAMSIT) Figure 8: Optimised trajectory (DITAN) COMPARISON BETWEEN AGA AND GA STRATEGIES • Paths involving only GA (GA-only) are compared to strategies with AGA in combination with or in substitution to GA (AGA+GA). • A preliminary purely energetic analysis will be performed (phasing is not taken into account; we look for the maximum performances theoretically achievable in both cases). • Considering the actual phase of the planets, two missions of great scientific interest, to Jupiter and to Neptune, will be studied, showing optimal launch options in the two cases ENERGY-BASED ANALYSIS: HIGH ENERGY MISSION Missions to Outer planets: target is the sphere of influence of the selected celestial body Sun observation mission: target is a perihelion distance of four solar radii Launch excess velocity: 3 km/s, 5 km/s and 7 km/s; E*: 3.73 Flybys: A maximum of 4 intermediate planetary encounters for GA-only, 3 in case of AGA+GA. Obtained results (see Table 5 and 6). From energy-based considerations, unfeasible solutions can be now disregarded, thus reducing the computational time of the subsequent analysis, which introduces the phasing model. Table 4: GA-only strategies that allow minimum ToF Table 5: AGA+GA strategies that allow minimum ToF PHASING FEASIBILITY STUDY: MISSIONS TO JUPITER Time span: 5 years, from 1/1/2007 to 1/1/2012, step 1 Julian Day Launch excess velocity:from 2.5 to 7 km/s, step 0.25 km/s Paths analysed: 13 for GA-only, 18 for AGA+GA RR (=N/D): both N and D from1 to 4 Bound orbits: max 4 Maximum g-load: 12 Maximum ToF: 7 sidereal years Tolerance: 5° E*: 3.73 MM: ( w=[w1, w2, w3]) MM1 -> w=[0.75, 1, 1] MM2 -> w=[0.75, 1, 0] MM3 -> w=[0, 1, 1] Figure 9:To Jupiter; GA-only case; trajectory minimising MM1 Table 6: To Jupiter; Best trajectories in the GA-only case Table 7: To Jupiter; Best trajectories in the AGA+GA case Figure 10:To Jupiter; AGA+GA; trajectory minimising MM1 PHASING FEASIBILITY STUDY: MISSIONS TO NEPTUNE Time span: 15 years, from 1/1/2005 to 1/1/2020, step 1 Julian Day Launch excess velocity:from 2.5 to 9 km/s, step 0.25 km/s Paths analysed: 36 for GA-only, 37 for AGA+GA RR (=N/D): both N and D from1 to 4 Bound orbits: max 4 Maximum g-load: 12 Maximum ToF: 15 sidereal years Tolerance: 5° E*: 5 MM: ( w=[w1, w2, w3]) MM1 -> w=[1.5, 1, 1] MM2 -> w=[1.5, 1, 0] MM3 -> w=[0, 1, 1] Figure 11:To Neptune; GA-only case; trajectory minimising MM1 Table 8: To Neptune; Best trajectories in the GA-only case Table 9: To Neptune; Best trajectories in the AGA+GA case Figure 12:To Neptune; AGA+GA; trajectory minimising MM1
