Download
1 / 1
20 likes | 211 Views
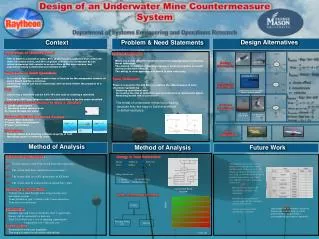
Design of an Underwater Mine Countermeasure System Department of Systems Engineering and Operations Research . Design Alternatives . Context. Problem & Need Statements. Importance of Maritime Travel

E N D
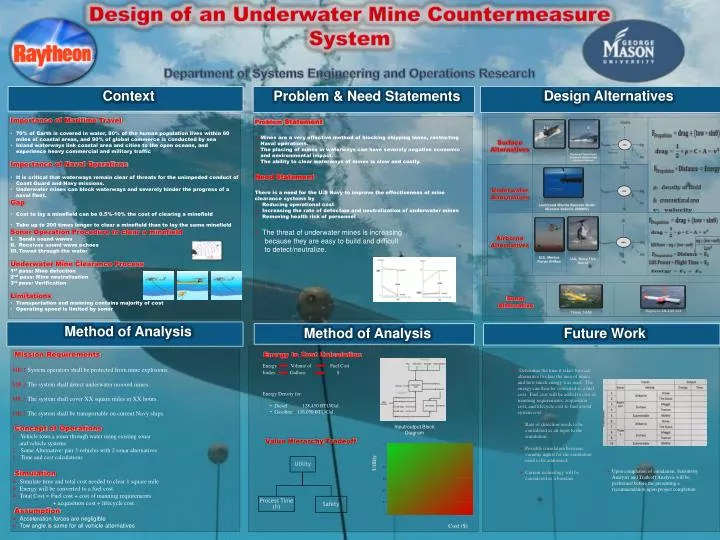
Design of an Underwater Mine Countermeasure System Department of Systems Engineering and Operations Research Design Alternatives Context Problem & Need Statements • Importance of Maritime Travel • 70% of Earth is covered in water, 80% of the human population lives within 60 miles of coastal areas, and 90% of global commerce is conducted by sea • Inland waterways link coastal area and cities to the open oceans, and experience heavy commercial and military traffic • Importance of Naval Operations • It is critical that waterways remain clear of threats for the unimpeded conduct of Coast Guard and Navy missions. • Underwater mines can block waterways and severely hinder the progress of a naval fleet. • Gap • Cost to lay a minefield can be 0.5%-10% the cost of clearing a minefield • Take up to 200 times longer to clear a minefield than to lay the same minefield • Sonar Operation Procedure to clear a minefield • Sends sound waves • Receives sound wave echoes • Towed through the water • Underwater Mine Clearance Process • 1st pass: Mine detection • 2nd pass: Mine neutralization • 3rd pass: Verification • Limitations • Transportation and manning contains majority of cost • Operating speed is limited by sonar • ProblemStatement • Mines are a very effective method of blocking shipping lanes, restricting Naval operations. • The placing of mines in waterways can have severely negative economic and environmental impact. • The ability to clear waterways of mines is slow and costly. • Need Statement • There is a need for the U.S Navy to improve the effectiveness of mine clearance systemsby • Reducing operational cost • Increasing the rate of detection and neutralization of underwater mines • Removing health risk of personnel • The threat of underwater mines is increasing • because they are easy to build and difficult • to detect/neutralize. Textron Fleet-Class Common Unmanned Surface Vessel Lockheed Martin Remote Multi-Mission Vehicle (RMMV) U.S. Marine Corps K-Max U.S. Navy Fire Scout Raytheon AN/AQS-20A Thales T-SAS Method of Analysis Method of Analysis Future Work Mission Requirements MR.1 System operators shall be protected from mine explosions. MR.2 The system shall detect underwater moored mines. MR.3 The system shall cover XX square miles in XX hours. MR.4 The system shall be transportable on current Navy ships. • Concept of Operations • Vehicle tows a sonar through water using existing sonar • and vehicle systems • Sonar Alternative: pair 3 vehicles with 2 sonar alternatives • Time and cost calculations • Simulation • Simulate time and total cost needed to clear 1 square mile • Energy will be converted to a fuel cost. • Total Cost = Fuel cost + cost of manning requirements • + acquisition cost + lifecycle cost . • Assumption • Acceleration forces are negligible • Tow angle is same for all vehicle alternatives Energy to Cost Calculation Energy Volume of Fuel Cost Joules Gallons $ • Determine the time it takes for each alternative to clear the area of mines, and how much energy was used. The energy can then be converted to a fuel cost. Fuel cost will be added to cost of manning requirements, acquisition cost, and lifecycle cost to find a total system cost. • Rate of detection needs to be considered as an input to the simulation. • Possible correlation between variable inputs for the simulation need to be addressed. • Current technology will be considered as a baseline. • Energy Density for: • Diesel = 128,450 BTU/Gal. • Gasoline = 116,090 BTU/Gal. Input/output Block Diagram Utility Value Hierarchy/Tradeoff • Upon completion of simulation, Sensitivity Analysis and Tradeoff Analysis will be performed before the presenting a recommendation upon project completion. Cost ($) Siamak KhalediHari Mann James Perkovich Samar Zayed