Download
1 / 30
300 likes | 425 Views
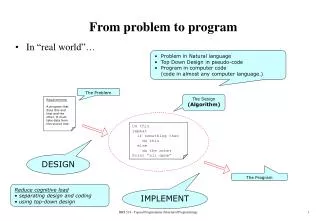
From a problem to program. Scientific problem Mathematical model: exact, often continuous functions Numerical, computational model algorithms Computer programs Profiling of the program

E N D
From a problem to program • Scientific problem • Mathematical model: exact, often continuous functions • Numerical, computational model • algorithms • Computer programs • Profiling of the program • Computation • Error estimation • Analysis of results
Sources of error • Mathematical model: too simple, not flexible enough • Numerical errors: discretization, truncation • Errors in data: statistical, systematic • Problems in the algorithms: numerical instability • Rounding errors
Well- and ill-posed problems • A task is well-posed, if the solution • Exist for all starting values • Is unique • Is stable for all initial values • Ill posed problem does not have these properties.
Well- and ill-posed problems • Solutions of well-posed problems are good approximations of the exact solution. • An ill-posed problem cannot be solved reliably and exactly. • There are special methods for ill-posed problem which give agreeable solutions.
Integers • Integers are exact in a computer. • Integers are presented with a fixed number of bits. • The largest and smallest integer exists. Overflow can happen. • The number of bits is usually a certain numbers of bytes (8 bits). • Examples: 2 bytes(16 bits), 4 bytes (32 bits), or even 8 bytes (64 bits). • In many systems the number of bytes can be chosen.
Integers (kokonaisluvut) • different presentations, the order of bits varies • Example two’s complement n bits, smallest -2n-1 and largest2 n-1-1
Floating point numbers (liukuluvut) • Floating point numbers are approximations to real numbers. • A floating point number consist of two integers, mantissa m and exponent e, which both include a sign (positive or negative). As a formula f=m2e. • Thus the smallest (fmin) and largest (fmax) floating point number exists. Floating point numbers are not distributed evenly at interval (fmin, fmax). • In principle the base does not need to be 2.
From real number to a floating point number • Truncation or rounding • Numbers are truncated also in arithmetic operations. • Programming languages usually allow one to choose the precision, for instance 32 or 64 bits. • IEEE: mantissa24 bits andexponent 8 bits. • Largest floating point number1038 and smallest positive floating point number is10-38.
Overflow or underflow • Overflow occurs when one exceeds the largest floating point number. Underflow occurs with anything smaller than the smallest floating point number. • Overflow can sometimes be avoided by reformulating the equation. • Examplean/bn = (a/b)n • Sometimes scaling the variables can help. • If -statements
Matlab REALMAX Largest positive floating point number. x = realmax is the largest floating point number representable on this computer. Anything larger overflows. REALMIN Smallest positive floating point number. x = realmin is the smallest positive normalized floating point number on this computer. Anything smaller underflows or is an IEEE "denormal".
Matlab (a/b)^n or a^n/b^n? >> a=5; b=3; n = log(realmax)/log(a/b) % choose a,b n = % compute n 1.3895e+03 >> (a/b)^n % gives result ans = 1.7977e+308 >> a^n/b^n % does not work ans = NaN
Rounding errors • A floating point number is only an approximation for a real number: rounding errors cannot be avoided. • Rounding errors occurs in the input of data and in computations. • Minimize the amount of arithmetic operations. • Round only the final results. • Use large precision.
Rounding errors • summations and iterations • It is dangerous to compare directly the values of two floating point variables. It is better to test that their difference is smaller than a given limit. Example.Comparison of two floating point numbersa and b. Not good if a = b.Better: if abs(a-b) < epsilon, where epsilon is a suitable value.
Cancellation error • Occurs when two floating point numbers are large compared to their precision. • When the difference of the two numbers is about the same as the precision of the more inaccurate number, it is not accurate enough. • This kind of error is called thecatastrophic cancellation (kumoutumisvirhe).
Example • Two floating point numbers x and y, and their errosDx and Dy. • If x=0.5554 and y=0.5553, and the errors Dx = Dy = 0.00005, then the difference is x-y=0.0001. The error for the difference would be 0.00007! (Dahlquist and Björk 1974)
Matlab: » x = 0.5554; y= 0.5553; » x-y » ans = 1.0000e-004 »dx = 0.00005; dy = dx; » % law of propagation of errors » sqrt(dx^2+dy^2) ans = 7.0711e-005
Esimerkki • Laskettaessa yhteen hyvin suuri ja pieni luku voi käydä niin, että pienempiluku on samaa suuruusluokkaa kuin suuremman luvun tarkkuus, jolloinpienemmällä luvulla ei ole mitään vaikutusta lopputulokseen. • Ratkaisunatähänkin ongelmaan on useinalgoritmin vaihto eli laskukaavan saattaminen johonkinmuuhun matemaattisesti ekvivalenttiin, mutta numeerisesti erilaiseen muotoon.
Example • Sum of alternating serie exp(-x) = 1/exp(x) • Numerical derivative (f(x+h)-f(x))/h
Scaling • Peruslaskutoimituksia pitäisi suorittaa mieluiten luvuilla, jotkaovat keskenään samaa suuruusluokkaa ja järkevän suuruisiaverrattuina lukualueeseen ja liukulukujen tarkkuuteen. • Ongelmajoudutaan usein skaalaamaan, jotta pysyttäisiin liukulukualueenrajoissa.
Skaalaus • Muuttujat eivät saisi olla laadullisia suureita. • Laaduttomiin suureisiinpäästään jakamalla tällaiset muuttujat sopivilla probleemaan liittyvillä'mittatikuilla', jotka muuntavat muuttujien arvot järkevän suuruisiksi. • Käyttäjäystävällinen ohjelma tekee tietenkin skaalaukset sisäisesti.Syöttödata annetaan sille fysikaalisissa yksiköissä ja se palauttaa myöstulokset näissä yksiköissä. Muunnokset tapahtuvat siis juuri ennentulostusta ja syötön jälkeen.
Discretization • Discretization means estimation of a continuous function with discrete function with a limited number of points. • This causes the so called discretization error.
Truncation • For simplicity consider a function of one variable f(x). • In computer the function must be truncated to a finite interval a<x<b. • The results may inaccurate if the function f is not zero outside the interval (a,b).
Integration of Lorenz function >> f = inline(’1./(1+x.^2)’, ’x’); >> quad(f,-10,10) ans = 2.9423 >> quad(f,-100,100) ans = 3.1216 >> quad(f,-1000,1000) ans = 3.1396 >> quad(f,-100000,100000) ans = 3.1416 vrt. vanha versio antaa 65.1343!!!
Discretization • Interval (a,b) is divided to subintervals {a=x1< x2<…< xN = b}. • The discrete approximation of the function is a set of its values {f(a) =f(x1), f(x2),…, f(xN) = f(b)}. • Choosing the points x1,x2,…,xNis crucial for the accuracy of the results.
Trapezoidal formula for integration • Integrate f(x) from at interval (a,b) • Choose the points {a=x1, x2,…,xN=b}. • Replace the integral by the sum Σi½ (f(xi)-f(xi-1)) (xi-xi-1)
Lorenz function, integration trapezoidal formula (puolisuunnikassääntö) x =-10:0.1:10; trapz(x,f(x)) ans = 2.9423 x =-1000:0.1:1000; trapz(x,f(x)) ans = 3.1396 x = -1000:1:1000; trapz(x,f(x)) ans = 3.1513
Numerical derivative • Mathematically the derivative of the function f is the limit (f(x+h)-f(x))/h when h approaches to zero. • Numerical approximation of the derivative f’(xi) ≈ (f(xi+1) –f(xi))/(xi+1–xi)
Numerical derivative » x = 0:0.1:4*pi; h=0.1; subplot(1,2,1), plot(x+h/2,(cos(x+h)-cos(x))/h,x,-sin(x),'.') » x = 0:0.5:4*pi; h=0.5; subplot(1,2,2), plot(x+h/2,(cos(x+h)-cos(x))/h,x,-sin(x),'.')
Important • Matemaattisesti ekvivalentitalgoritmit (antaisivat samat tulokset, jos laskentatarkkuus olisi ääretön jalaskentaan käytettävät resurssit olisivat äärettömät) eivät juuri koskaan anna samojatuloksia eivätkä ole juuri koskaan yhtä tehokkaita. • Mathematically equivalent algorithms do not usually give the same results and are not equally effective.