Download
1 / 1
10 likes | 153 Views
Roll. Superior. mm. Degrees. START with the identity transform. 0 10 20 30 40. 0 10 20 30 40. Pitch. Left. Key:. Transformation. True. best guess. mm. Degrees. combine_air. reslice. AIR. Combine two transformations using matrix multiplication. iAIR.

E N D
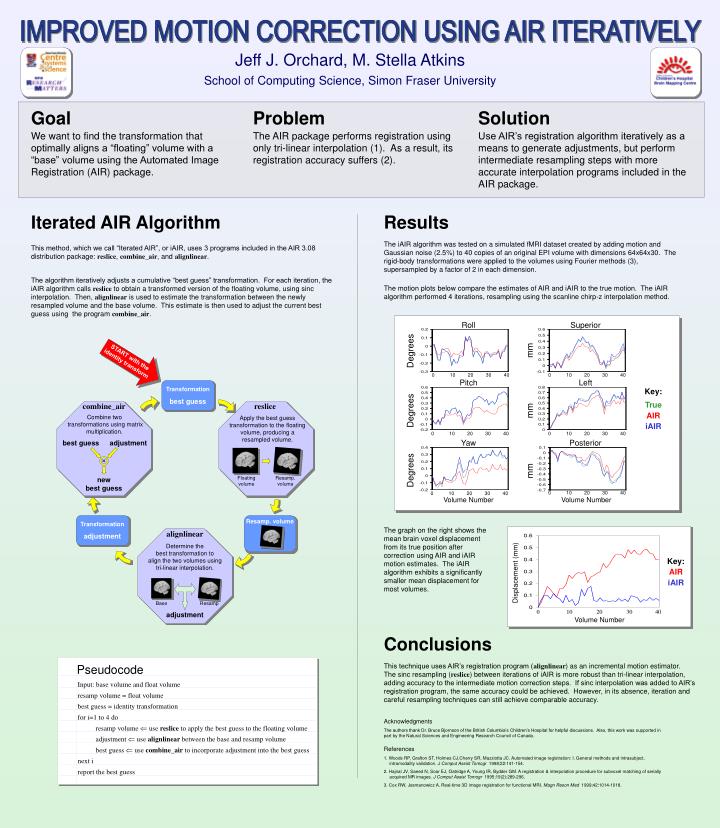
Roll Superior mm Degrees START with the identity transform 0 10 20 30 40 0 10 20 30 40 Pitch Left Key: Transformation True best guess mm Degrees combine_air reslice AIR Combine two transformations using matrix multiplication. iAIR Apply the best guesstransformation to the floating volume, producing a resampled volume. 0 10 20 30 40 0 10 20 30 40 Yaw Posterior best guess adjustment Degrees mm Floatingvolume Resamp.volume newbest guess 0 10 20 30 40 0 10 20 30 40 Volume Number Volume Number Resamp. volume Transformation alignlinear adjustment Determine thebest transformation toalign the two volumes using tri-linear interpolation. Key: AIR Displacement (mm) iAIR Base Resamp Volume Number adjustment 0 10 20 30 40 Pseudocode Input: base volume and float volume resamp volume = float volume best guess = identity transformation for i=1 to 4 do resamp volume use reslice to apply the best guess to the floating volume adjustment use alignlinear between the base and resamp volume best guess use combine_air to incorporate adjustment into the best guess next i report the best guess IMPROVED MOTION CORRECTION USING AIR ITERATIVELY Jeff J. Orchard, M. Stella Atkins School of Computing Science, Simon Fraser University Goal Problem Solution We want to find the transformation that optimally aligns a “floating” volume with a “base” volume using the Automated Image Registration (AIR) package. The AIR package performs registration using only tri-linear interpolation (1). As a result, its registration accuracy suffers (2). Use AIR’s registration algorithm iteratively as a means to generate adjustments, but perform intermediate resampling steps with more accurate interpolation programs included in the AIR package. Iterated AIR Algorithm Results The iAIR algorithm was tested on a simulated fMRI dataset created by adding motion and Gaussian noise (2.5%) to 40 copies of an original EPI volume with dimensions 64x64x30. The rigid-body transformations were applied to the volumes using Fourier methods (3), supersampled by a factor of 2 in each dimension. This method, which we call “Iterated AIR”, or iAIR, uses 3 programs included in the AIR 3.08 distribution package: reslice, combine_air, and alignlinear. The algorithm iteratively adjusts a cumulative “best guess” transformation. For each iteration, the iAIR algorithm calls reslice to obtain a transformed version of the floating volume, using sinc interpolation. Then, alignlinear is used to estimate the transformation between the newly resampled volume and the base volume. This estimate is then used to adjust the current best guess using the program combine_air. The motion plots below compare the estimates of AIR and iAIR to the true motion. The iAIR algorithm performed 4 iterations, resampling using the scanline chirp-z interpolation method. The graph on the right shows the mean brain voxel displacement from its true position after correction using AIR and iAIR motion estimates. The iAIR algorithm exhibits a significantly smaller mean displacement for most volumes. Conclusions This technique uses AIR’s registration program (alignlinear) as an incremental motion estimator. The sinc resampling (reslice) between iterations of iAIR is more robust than tri-linear interpolation, adding accuracy to the intermediate motion correction steps. If sinc interpolation was added to AIR’s registration program, the same accuracy could be achieved. However, in its absence, iteration and careful resampling techniques can still achieve comparable accuracy. Acknowledgments The authors thank Dr. Bruce Bjornson of the British Columbia’s Children’s Hospital for helpful discussions. Also, this work was supported in part by the Natural Sciences and Engineering Research Council of Canada. References 1. Woods RP, Grafton ST, Holmes CJ,Cherry SR, Mazziotta JC. Automated image registration: I. General methods and intrasubject, intramodality validation. J Comput Assist Tomogr 1998;22:141-154. 2. Hajnal JV, Saeed N, Soar EJ, Oatridge A, Young IR, Bydder GM. A registration & interpolation procedure for subvoxel matching of serially acquired MR images. J Comput Assist Tomogr 1995;19(2):289-296. 3. Cox RW, Jesmanowicz A. Real-time 3D image registration for functional MRI. Magn Reson Med 1999;42:1014-1018.