Download
1 / 38
380 likes | 393 Views
This article discusses the planning process for extracting and analyzing LIGO's Pulsar Search data using the Grid archive interferometer and short and long time frames. It also explores the use of temporal logics and heuristic search planning techniques.

E N D
CS541 Review Jim Blythe
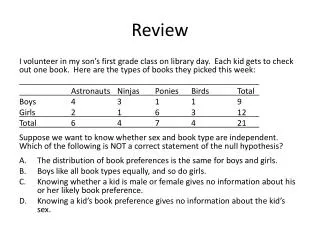
archive Interferometer Hz Time raw channels LIGO’s Pulsar Search(Laser Interferometer Gravitational-wave Observatory) Extract channel Short Fourier Transform transpose Long time frames 30 minutes Short time frames Single Frame Time-frequency Image Extract frequency range event DB Construct image Find Candidate Store
(operator pulsar-search (preconds ((<host> (or Condor-pool Mpi)) (<start-time> Number) (<channel> Channel) (<fcenter> Number) (<right-ascension> Number) (<sample-rate> Number) (<file> File-Handle) ;; These two are parameters for the frequency-extract. (<f0> (and Number (get-low-freq-from-center-and-band <fcenter> <fband>))) (<fN> (and Number (get-high-freq-from-center-and-band <fcenter> <fband>))) (<run-time> (and Number (estimate-pulsar-search-run-time <start-time> <end-time> <sample-rate> <f0> <fN> <host> <run-time>))) …) (and (available pulsar-search <host>) (forall ((<sub-sft-file-group> (and File-Group-Handle (gen-sub-sft-range-for-pulsar-search <f0> <fN> <start-time> <end-time> <sub-sft-file-group>)))) (and (sub-sft-group <start-time> <end-time> <channel> <instrument> <format> <f0> <fN> <sample-rate> <sub-sft-file-group>) (at <sub-sft-file-group> <host>))))) Operators include data dependencies, host and resource constraints. (effects () ( (add (created <file>)) (add (at <file> <host>)) (add (pulsar <start-time> <end-time> <channel> <instrument> <format> <fcenter> <fband> <fderv1> <fderv2> <fderv3> <fderv4> <fderv5> <right-ascension> <declination> <sample-rate> <file>)) ) ))
Derive cost estimate from a relaxed planning problem • Ignore the deletes on actions • BUT – still NP-hard, so approximate: • For individual propositions p: d(s, p) = 0 if p is true in s = 1 + min(d(s, pre(a))) otherwise [min over actions a that add p]
HSP2 overview • Best-first search, using h+ • Based on WA* - weighted A*: f(n) = g(n) + W * h(n). If W = 1, it’s A* (with admissible h). If W > 1, it’s a little greedy – generally finds solutions faster, but not optimal. • In HSP2, W = 5
HSPr problem space • States are sets of atoms (correspond to sets of states in original space) • initial state is the goal G • Goal states are those that are true in s0 (initial state in planning problem) • Still use h+. h+(s) = sum g(s0, p)
Mutexes in HSPr, take 2 • Better definition: A set M of pairs R = {p, q} is a mutex set if (1) R is not true in s0 (2) for every op o that adds p, either o deletes q or o does not add q, and for some precond r of o, {r, q} is in M. Recursive definition allows for some interaction of the operators
Temporal planning with mutual exclusion relation • Propositions and actions are monotonically increasing, no-goods monotonically decreasing:
ASPEN • Combine planning and scheduling steps as alternative ‘conflict repair’ operations • Activities have start time, end time, duration • Maintain ‘most-commitment’ approach – easier to reason about temporal dependencies with full information • C.f. TLPlan
Using EBL to improve plan quality • Given: planning domain, evaluation function planner’s plan, a better plan • Learn: control knowledge to produce the better plan • Explanation used: explain why the alternative plan is better • Target concept: control rules that make choices based on the planner state and meta-state
Explaining better plans recursively:target concept: shared subgoal
Sources of uncertainty • Incomplete knowledge of the world (uncertain initial state) • Non-deterministic effects of actions • Effects of external agents or state dynamics.
Dealing with uncertainty: re-planning and conditional planning • Re-planning: • Make a plan assuming nothing bad will happen • Build a new plan if a problem is found • (either re-plan to the goal state or try to repair the plan) • In some cases, this is too late. • Deal with contingencies (plans for bad outcomes) at planning time, before they occur. • Can’t plan for every contingency, so need to prioritize • Implies sensing • Build a plan that reduces the number of contingencies requires (conformant planning) • May not be possible
Computing the probability of success 2: Bayes nets Time-stamped literal node Action outcome node What is the worst-case time complexity of this algorithm?
MAXPLAN • Inspired by SATPLAN. Compile planning problem to an instance of E-MAJSAT • E-MAJSAT: given a boolean formula with variables that are either choice variables or chance variables, find an assignment to the choice variables that maximizes the probability that the formula is true. • Choice variables: we can control them • e.g. which action to use • Chance variables: we cannot control them • e.g. the weather, the outcome of each action, .. • Then use standard algorithm to compute and maximize probability of success
Representing external sources of change Model actions that external agents can take in the same way as actions that the planner can take. (event oil-spills (probability 0.1) (preconds (and (oil-in-tanker <sea-sector>) (poor-weather <sea-sector>))) (effects (del (oil-in-tanker <sea-sector>)) (add (oil-in-sea <sea-sector>))))
Example: the weather events and the corresponding markov chain • The markov chain shows possible states independent of time. • As long as transition probabilities are independent of time, the probability of the state at some future time t can be computed in logarithmic time complexity in t. • The computation time is polynomial in the number of states in the markov chain.
The event graph • Captures the dependencies between events needed to build small but correct markov chains. • Any event whose literals should be included will be an ancestor of the events governing objective literals.
Craig Boutilier Structured representation • States decomposable into state variables • Structured representations the norm in AI • STRIPS, Sit-Calc., Bayesian networks, etc. • Describe how actions affect/depend on features • Natural, concise, can be exploited computationally • Same ideas can be used for MDPs • actions, rewards, policies, value functions, etc. • dynamic Bayes nets [DeanKanazawa89,BouDeaGol95] • decision trees and diagrams [BouDeaGol95,Hoeyetal99]
Craig Boutilier Action Representation – DBN/ADD
Craig Boutilier Structured Policy and Value Function