Download
1 / 16
160 likes | 173 Views
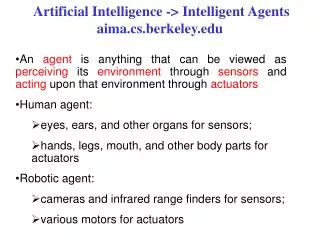
Dive into the world of agent processing in AI, from sensor data to motor control. Discover various agent types and their functions, with real-world examples like a mother responding to her baby's cry and a taxi driver reacting to a stop sign.

E N D
74.419 Artificial IntelligenceIntro Agents • General Agent Architectures • Agent Processing – Concepts, Examples • Example of a simple Reflexive Agent • Types of Agents • Task Environments • Examples of Agent Types • Based on Norvig, Ch. 2 and Nilsson, Ch. 1, 2, 25
Agent Architecture (Norvig) sensor data perception cognition reasoning | goal setting, re-evaluation of goals | planning | learningaction selection action performance motor control
Agent Processing sensor data speech signal, image, ... perception phonemes, visual objects, ... cognition concepts (language or visual) reasoning conclusions, generalization goal setting & evaluation priorities, utility function planning from goal to set of actions action selection & execution control action performance & motor control transform high-level actions into low-level robot actions learning perceptual,conceptual, plan level
Example 1: Mother hears her Baby cry. sensor data - soundwave, auditory input perception- some squeaky noise; baby scream cognition- “my baby cries” reasoning- “I hope she is okay.” “She is hungry.” goal setting, evaluation - “I have to see the doctor with her.” “We have to move to another city.” ... action / plan selection - go feed her planning - drop laundry, walk upstairs, feed her action selection - drop laundry action performance - open hand motor control- move fingers in certain position
Example 2: Taxi Driver sees Stop sign. sensor data - light waves, visual input perception - red sign with some letters cognition- “STOP sign” reasoning- “I have to stop.” “I will be late.” goal setting, evaluation – “Stop the car” “Next time I’ll take the other route.” “I quit my job.” action / plan selection - stop and wait; watch traffic action selection - hit the brakes, ... action performance - move right foot on brake pedal motor control- move foot along a trajectory until it rests on the brake pedal; apply certain force
Agents – Speech Processing Speech Signal preprocessing – sampling, digitizing, filtering sensory data – digitized sound wave perception – frequency analysis, feature extraction, phoneme/word recognition cognition – ‘baby cries’
Agents – Visual Processing Visual Images preprocessing – digitization, filtering, sensory data – digitized bitmap perception – feature extraction, classification,object recognition cognition – ‘stop sign’
Agents – Effector/Actuator Control Motor Control selection of (intentional) actions – based on state and goal evaluation (utility function) reflexive / reactive behaviour– action ‘without thinking’ action performance– transform (higher level) action commands into agent’s basic actions motor control– commands for agent’s basic action repertoire, e.g. move grasper to point
Agents – Proprioception Connecting Sensory Input and Motor Control proprioception – delivers sensory information on agent’s internal physical state, e.g. angles of joints of limbs used in planning and performing (motor) actions and to provide feedback for motor control (also for other physiological processes like hunger, thirst)
Agent Architectures (Nilsson) Nilsson, Figures 25.2 and 25.3, p. 446-7
Types of Agents (Norvig) • Depending on the complexity of the behaviour function (i.e. the percept – action mapping) • simple Reflex Agents (low-level behaviour routines) • Agents with Memory (world states) • Agents with Goals (search, planning) • Agents with Utility Function (decision between goals)
Simple Reflex Agent – Example (Nilsson) • Robot in Maze • perceives 8 squares around it • low-level percept: can robot move to square or not • higher level percept: • 4 basic actions: left (west), right (east), up (north), down (south) • task is to move along a border
Task Environments(Norvig) • Depends on task, environment, and sensors • fully observable vs. partially observable • video camera in bright room vs. infrared camera • deterministic vs. stochastic vs. non-deterministic • assembly line vs. weather vs. “odds & gods” • episodic vs. non-episodic • assembly line vs. diagnostic repair robot • static vs. dynamic • room without vs. with other agents • discrete vs. continuous • chess game vs. autonomous vehicle
Robots – Sensors and Effectors • next class on Friday
Describe Flakey Sensor Equipment? Action Repertoire? Task Environment? Perceptions and Cognition? Goals? Intentions? Type of Agent?