Download
1 / 87
900 likes | 1.07k Views
The Phenomenology of Large Scale Structure. Motivation: A biased view of dark matters Gravitational Instability The spherical collapse model Tri-axial (ellipsoidal) collapse The random-walk description The halo mass function Halo progenitors, formation, and merger trees

E N D
The Phenomenology of Large Scale Structure • Motivation: A biased view of dark matters • Gravitational Instability • The spherical collapse model • Tri-axial (ellipsoidal) collapse • The random-walk description • The halo mass function • Halo progenitors, formation, and merger trees • Environmental effects in hierarchical models • (SDSS galaxies and their environment) • The Halo Model
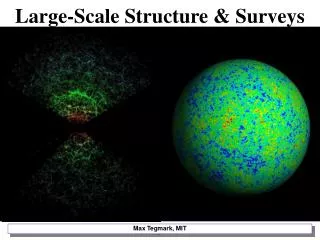
Galaxy clustering depends on type Large samples (SDSS, 2dF) now available to quantify this You can observe a lot just by watching. -Yogi Berra
Light is a biased tracer Not all galaxies are fair tracers of dark matter; To use galaxies as probes of underlying dark matter distribution, must understand ‘bias’
How to describe different point processes which are all built from the same underlying density field? THE HALO MODEL Review in Physics Reports (Cooray & Sheth 2002)
The Cosmic Background Radiation Cold: 2.725 K Smooth: 10-5 Simple physics Gaussian fluctuations = seeds of subsequent structure formation = simple(r) math Logic which follows is general
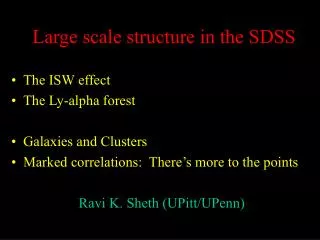
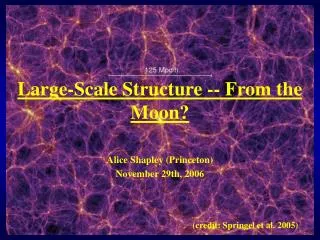
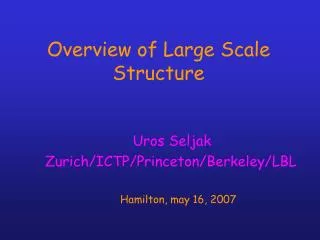
N-body simulations of gravitational clustering in an expanding universe
Cold Dark Matter • Simulations include gravity only (no gas) • Late-time field retains memory of initial conditions • Cosmic capitalism Co-moving volume ~ 100 Mpc/h
Cold Dark Matter • Cold: speeds are non-relativistic • To illustrate, 1000 km/s ×10Gyr ≈ 10Mpc; from z~1000 to present, nothing (except photons!) travels more than ~ 10Mpc • Dark: no idea (yet) when/where the stars light-up • Matter: gravity the dominant interaction
Models of halo abundances and clustering: Gravity in an expanding universeGoal:Use knowledge of initial conditions (CMB) to make inferences about late-time, nonlinear structures
10.077.696.000 cpu seconds • 10.077.696 USD (total cost!) • 10.077 GBytes of data • postdocs • EXPENSIVE!!!
Hierarchical models Dark matter ‘haloes’ are basic building blocks of ‘nonlinear’structure Springel et al. 2005
Spherical evolution model • Initially, Ei = – GM/Ri + (HiRi)2/2 • Shells remain concentric as object evolves; if denser than background, object pulls itself together as background expands around it • At ‘turnaround’: E = – GM/rmax = Ei • So – GM/rmax = – GM/Ri + (HiRi)2/2 • Hence (Ri/r) = 1 – Hi2Ri3/2GM = 1 – (3Hi2 /8pG) (4pRi3/3)/M = 1 – 1/(1+Di) = Di/(1+Di)≈ Di
Virialization • Final object virializes: −W = 2K • Evir = W+K = W/2 = −GM/2rvir= −GM/rmax • so rvir = rmax/2: • Ratio of initial to final size = (density)⅓ • final density determined by initial overdensity • To form an object at present time, must have had a critical overdensity initially • Critical density ↔ Critical link-length! • To form objects at high redshift, must have been even more overdense initially
Spherical collapse Turnaround: E = -GM/rmax size Virialize: -W=2K E = W+K = W/2 rvir = rmax/2 time Modify gravity → modify collapse model
Exact Parametric Solution (Ri/R) vs. q and (t/ti) vs. qvery well approximated by… (Rinitial/R)3 = Mass/(rcomVolume) = 1 + d ~ (1 – dLinear/dsc)−dsc
Virial Motions • (Ri/rvir) ~ f(Di): ratio of initial and final sizes depends on initial overdensity • Mass M ~ Ri3 (since initial overdensity « 1) • So final virial density ~ M/rvir3 ~ (Ri/rvir)3 ~ function of critical density: hence, all virialized objects have the same density, whatever their mass • V2 ~ GM/rvir ~ M2/3: massive objects have larger internal velocities/temperatures
Halos and Fingers-of-God • Virial equilibrium: • V2 = GM/r = GM/(3M/4p200r)1/3 • Since halos have same density, massive halos have larger random internal velocities: V2 ~ M2/3 • V2 = GM/r = (G/H2) (M/r3) (Hr)2 = (8pG/3H2) (3M/4pr3) (Hr)2/2 = 200 r/rc (Hr)2/2 =W (10 Hr)2 • Halos should appear ~ ten times longer along line of sight than perpendicular to it: ‘Fingers-of-God’ • Think of V2 as Temperature; then Pressure ~ V2r
Assume a spherical cow…. (Gunn & Gott 1972; Press & Schechter 1974; Bond et al. 1991; Fosalba & Gaztanaga 1998)
The Random Walk Model Higher Redshift Critical over- density smaller mass patch within more massive region This patch forms halo of mass M MASS
From Walks to Halos: Ansätze • f(dc,s)ds= fraction of walks which first cross dc(z) at s ≈ fraction of initial volume in patches of comoving volume V(s) which were just dense enough to collapse at z ≈ fraction of initial mass in regions which each initially contained m =rV(1+dc) ≈rV(s) and which were just dense enough to collapse at z (r is comoving density of background) ≈ dm m n(m,dc)/r
The Random Walk Model Higher Redshift Critical over- density Typical mass smaller at early times: hierarchical clustering MASS
Scaling laws • Recall characteristic scale V(s) defined by dc2(z) ~ s ~ s2(R) ~∫dk/k k3 P(k) W2(kR) • If P(k) ~ knwith n>−3, then s ~ R–3–n • Since M~R3, characteristic mass scale at z is M*(z)~ [dc(z)] –6/(3+n) • Since dc(z) decreases with time, characteristic mass increases with time → Hierarchical Clustering
Random walk with absorbing barrier • f(first cross d1 at s) = 0∫sdSf(first cross d0 at S) × f(first cross d1 at s | first cross d0 at S) • (where d1 >d0 and s>S ) • But second term is function of d1 −d0 and s − S • (because subsequent steps independent of previous ones, so statistics of subsequent steps are simply a shift of origin –– a key assumption we will return to later) • f(d1,s) = 0∫sdSf(d0,S) f(d1−d0|s−S) • To solve….
…take Laplace Transform of both sides: • L(d1,t) = 0∫∞dsf(d1,s) exp(–ts) = 0∫∞ds exp(–ts) 0∫sdSf(d0,S)f(d1–d0,s–S) = 0∫∞dSf(d0,S) e-tSs-S∫∞dsf(d1–d0,s–S) e-t(s-S) = L(d0,t) L(d1–d0,t) • Solution must have form:L(d1,t) = exp(–Cd1) • After some algebra (see notes): L(d1,t) = exp(–d1√2t) • Inverting this transform yields: • f(d1,s) ds = (d12/2πs)½exp(–d12/2s) ds/s • Notice: few walks cross before d12=2s
The Mass Function • f(dc,s) ds = (dc2/2πs)½exp(–dc2/2s) ds/s • For power-law P(k):dc2/s = (M/M*)(n+3)/3 • n(m,dc) dm = (r/m)/√2p (n+3)/3 dm/m (M/M*)(n+3)/6exp[–(M/M*)(n+3)/3/2] • (Press & Schechter 1974; Bond et al. 1991)
Simplification because… • Everything local • Evolution determined by cosmology (competition between gravity and expansion) • Statistics determined by initial fluctuation field: since Gaussian, statistics specified by initial power-spectrum P(k) • Fact that only very fat cows are spherical is a detail (crucial for precision cosmology)
Only very fat cows are spherical…. (Sheth, Mo & Tormen 2001; Rossi, Sheth & Tormen 2007)
(Reed et al. 2003) The Halo Mass Function • Small halos collapse/virialize first • Can also model halo spatial distribution • Massive halos more strongly clustered (current parametrizations by Sheth & Tormen 1999; Jenkins etal. 2001)
Theory predicts… • Can rescale halo abundances to ‘universal’ form, independent of P(k), z, cosmology • Greatly simplifies likelihood analyses • Intimate connection between abundance and clustering of dark halos • Can use cluster clustering as check that cluster mass-observable relation correctly calibrated • Important to test if these fortunate simplifications also hold at 1% precision (Sheth & Tormen 1999)
Non-Maxwellian Velocities? • v = vvir + vhalo • Maxwellian/Gaussian velocity within halo (dispersion depends on parent halo mass) + Gaussian velocity of parent halo (from linear theory ≈ independent of m) • Hence, at fixed m, distribution of vis convolution of two Gaussians, i.e., p(v|m)is Gaussian, with dispersion svir2(m) + sLin2 = (m/m*)2/3svir2(m*)+ sLin2
Two contributions to velocities ~ mass1/3 • Virial motions (i.e., nonlinear theory terms) dominate for particles in massive halos • Halo motions (linear theory) dominate for particles in low mass halos Growth rate of halo motions ~ consistent with linear theory
Exponential tails are generic • p(v) = ∫dm mn(m) G(v|m) F(t) = ∫dv eivt p(v) = ∫dm n(m)m e-t2svir2(m)/2e-t2sLin2/2 • For P(k) ~ k−1, mass function n(m) ~ power-law times exp[−(m/m*)2/3/2], so integral is: F(t) = e-t2sLin2/2 [1 +t2svir2(m*)]−1/2 • Fourier transform is product of Gaussian and FT of K0 Bessel function, so p(v) is convolution of G(v) with K0(v) • Sincesvir(m*)~ sLin, p(v) ~ Gaussian at |v|<sLin but exponential-like tails extend to large v(Sheth 1996)
Comparison with simulations Sheth & Diaferio 2001 • Gaussian core with exponential tails as expected!
Spherical evolution model • ‘Collapse’ depends on initial over-density Di; same for all initial sizes • Critical density depends on cosmology • Final objects all have same density, whatever their initial sizes • Collapsed objects called halos; • ~ 200× denser than background, whatever their mass (Figure shows particles at z~2 which, at z~0, are in a cluster)
Initial spatial distribution within patch (at z~1000)... …stochastic (initial conditions Gaussian random field); study `forest’ of merger history ‘trees’. …encodes information about subsequent ‘merger history’ of object (Mo & White 1996; Sheth 1996)
Random Walk = Accretion history High-z Low-z over- density Major merger small mass at high-z larger mass at low z MASS
Other features of the model • Quantify forest of merger histories as function of halo mass (formation times, mass accretion, etc.) • Model spatial distribution of halos: (halo clustering/biasing) • Abundance + clustering calibrates Mass • Halos and their environment: • Nature vs. nurture—key to simplifying models of galaxy formation
Merger trees • (Bond et al. 1991; Lacey & Cole 1993) • Fraction of M (halo which virialized at T) which was in m<M at t<T:f[s,dc(t)|S,dc(T)] ds= f[s−S,dc(t)−dc(T)] ds= f(m,t|M,T) dm =(m/M) N(m,t|M,T) dm • N(m|M) is mean number of smaller halos at earlier time • (see Sheth 1996 and Sheth & Lemson 1999 for higher order moments) (from Wechsler et al. 2002)
Correlations with environment Critical over- density over-dense Easier to get here from over-dense environment This patch forms halo of mass M ‘Top-heavy’ mass function in dense regions under-dense MASS
The Peak-Background Split • Consider random walks centered on cells which have overdensity d when smoothed on some large scale V: M=rV(1+d)» M* • On large scales (M» M*, so S(M)«1), fluctuations are small (i.e., d «1), so walks start from close to origin: • f(m,t|M,T) dm = f[s−S,dc(t)−d] ds ≈ f[s,dc−d] ds ≈ f[s,dc] ds −d (df/ddc) ≈ f(s,dc) ds [1 −(d/dc) (dlnf/dlndc)] ≈f(s,dc) ds [1 −(d/dc) (1 – dc2/s)]
Halo Bias on Large Scales • Ratio of mean number density in dense regions to mean number density in Universe: N(m,t|M,T)/n(m,t)V = (M/m) f(m,t|M,T)/(rV/m)f(m,t) [recall dense region had mass M = rV(1+d)] • But from peak-background split: f(m,t|M,T) ≈ f(m,dc) [1 −(d/dc)(1 – dc2/s)] • N(m,t|M,T)/n(m,t)V ≈ (1+d) [1 −(d/dc) (1 – dc2/s)] ≈ 1 − (d/dc) (1 – dc2/s) + d = 1 + b(m)d • Large-scale bias factor: b(m) ≡ 1 + (dc2/s – 1)/dc • Increases rapidly with m at m»m* (Cole & Kaiser 1989; Mo & White 1996; Sheth & Tormen 1999)
Halos and their environment • Easier to get to here from here than from here • Dense regions host more massive halos n(m,t|d) = [1 + b(m,t)d] n(m,t) b(m,t) increases with m, so n(m,t|d) ≠ (1+d) n(m,t) Fundamental basis for models of halo bias (and hence of galaxy bias)
Most massive halos populate densest regions over-dense under-dense Key to understand galaxy biasing (Mo & White 1996; Sheth & Tormen 2002) n(m|d) = [1 + b(m)d] n(m)
Correlations with environment PAST Critical over- density over-dense FUTURE This patch forms halo of mass M At fixed mass, formation history independent of future/environment under-dense MASS