Download
1 / 33
330 likes | 349 Views
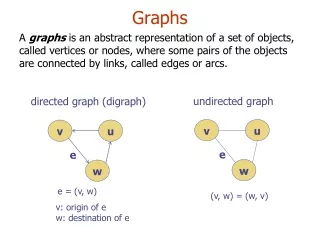
Graphs. Chapter 15 explain graph-based algorithms Graph definitions Graph implementations. Graph Traversals. Data Structures and Other Objects Using C++. Graph Representation. A graph G = (V, E) V = set of vertices E = set of edges = subset of V V Thus |E| = O(|V| 2 ).

E N D
Graphs • Chapter 15 explain graph-based algorithms • Graph definitions • Graph implementations. • Graph Traversals Data Structures and Other Objects Using C++
Graph Representation • A graph G = (V, E) • V = set of vertices • E = set of edges = subset of V V • Thus |E| = O(|V|2)
Graph Variations • Variations: • A connected graphhas a path from every vertex to every other • In an undirected graph: • Edge (u,v) = edge (v,u) • No self-loops • In a directed graph: • Edge (u,v) goes from vertex u to vertex v, notated uv
Graph Variations • More variations: • A weighted graph associates weights with either the edges or the vertices • e.g., a road map: edges might be weighted with distance • A hypergraph allows multiple edges between the same vertices • e.g., the call graph in a program (a function can get called from multiple points in another function)
Graphs • We will typically express running times in terms of |E| and |V| • If |E| |V|2the graph is dense • If |E| |V| the graph is sparse • If you know you are dealing with dense or sparse graphs, different data structures may make sense
Representing Graphs • Assume V = {1, 2, …, n} • An adjacency matrixrepresents the graph as a n x n matrix A: • A[i, j] = 1, if edge (i, j) E = 0, if edge (i, j) E • A[i, j] = weight on the edge, if edge (i, j) E = 0, if edge (i, j) E
Graphs: Adjacency Matrix • Example: 1 a d 2 4 b c 3
Graphs: Adjacency Matrix 1 • Example: a d 2 4 b c 3 • How much storage does the adjacency matrix require? • A: O(V2)
Graphs: Adjacency Matrix • The adjacency matrix is a dense representation • Usually too much storage for large graphs • But can be very efficient for small graphs • Most large interesting graphs are sparse • e.g., planar graphs, in which no edges cross, have |E| = O(|V|) by Euler’s formula • For this reason the adjacency list is often a more appropriate representation
Graphs: Adjacency List • Adjacency list: for each vertex v V, store a list of vertices adjacent to v • Example: For an undirected graph
Graphs: Adjacency List • Adjacency list: for each vertex v V, store a list of vertices adjacent to v • Example: For a directed graph
Graphs: Adjacency List • How much storage is required? • The degree of a vertex v = # of edges • Directed graphs have in-degree, out-degree • For directed graphs, # of items in adjacency lists is out-degree(v) = |E|takes O(V + E) storage • For undirected graphs, # items in adjacency lists is degree(v) = 2 |E| (handshaking lemma)also O(V + E) storage • So: Adjacency lists take O(V+E) storage
Graph Traverse • Given: a graph G = (V, E), directed or undirected • Goal: methodically explore every vertex and every edge • Ultimately: build a tree on the graph • Pick a vertex as the root • Choose certain edges to produce a tree • Note: might also build a forest if graph is not connected
Depth-First Search (DFS) • “Explore” a graph, turning it into a tree • One vertex at a time • Moving “deeper” from last visited vertex to unvisited one • Backtracks if no adjacent unvisited vertex • Uses a stack • A vertex is pushed onto the stack when it’s reached for the first time • A vertex is popped off the stack when it become a dead end, i.e., when there is no adjacent unvisited vertex
a b c d e f g h Example: DFS DFS tree: a b DFS traversal stack: f g h8,3 d7,4 c6,5 g5,6 e4,1 f3,2 b2,7 a1,8 c e d h
DFS: Kinds of edges • Tree edge • Back edge: from descendent to ancenstor • Forward edge: from ancenstor to descendent • Cross edge: between subtress
Notes on DFS • DFS can be implemented with graphs represented as: • adjacency matrices: Θ(V2) • adjacency lists: Θ(|V|+|E|) • Yields two distinct ordering of vertices: • order in which vertices are first encountered (pushed onto stack) • order in which vertices become dead-ends (popped off stack) • Applications: • checking connectivity, finding connected components • checking acyclicity • finding articulation points and biconnected components • searching state-space of problems for solution (AI)
Breadth-first search (BFS) • Visits graph vertices by moving across to all the neighbors of last visited vertex • Instead of a stack, BFS uses a queue • Similar to level-by-level tree traversal
a b c d e f g h Example: BFS a BFS tree: b e f g BFS traversal queue: h c a1 b2 e3 f4 g5 c6 h7 d8 d
Notes on BFS • BFS has same efficiency as DFS and can be implemented with graphs represented as: • adjacency matrices: Θ(V2) • adjacency lists: Θ(|V|+|E|) • Yields single ordering of vertices (order added/deleted from queue is the same) • Applications: same as DFS, but can also find paths from a vertex to all other vertices with the smallest number of edges
Directed Acyclic Graphs • A directed acyclic graph or DAG is a directed graph with no directed cycles:
DAG Shortest Paths • Problem: finding shortest paths in DAG
Dijkstra’s Algorithm • If no negative edge weights, Dijkstra’s essentially a weighted version of breadth-first search • Similar to breadth-first search • Grow a tree gradually, advancing from vertices taken from a queue
Dijkstra’s Algorithm B 2 10 D A Dijkstra(G) for each v V d[v] = ; d[s] = 0; S = ; Q = V; while (Q ) u = ExtractMin(Q); S = S U {u}; for each v u->Adj[] if (d[v] > d[u]+w(u,v)) d[v] = d[u]+w(u,v); 4 3 5 1 C
Dijkstra’s Algorithm B 2 10 D A s Dijkstra(G) for each v V d[v] = ; d[s] = 0; S = ; Q = V; while (Q ) u = ExtractMin(Q); S = S U {u}; for each v u->Adj[] if (d[v] > d[u]+w(u,v)) d[v] = d[u]+w(u,v); 0 4 3 5 1 C
Dijkstra’s Algorithm B 10 2 10 D A s Dijkstra(G) for each v V d[v] = ; d[s] = 0; S = ; Q = V; while (Q ) u = ExtractMin(Q); S = S U {u}; for each v u->Adj[] if (d[v] > d[u]+w(u,v)) d[v] = d[u]+w(u,v); 0 4 3 5 1 5 C S = {A}
Dijkstra’s Algorithm B 9 2 10 D A s Dijkstra(G) for each v V d[v] = ; d[s] = 0; S = ; Q = V; while (Q ) u = ExtractMin(Q); S = S U {u}; for each v u->Adj[] if (d[v] > d[u]+w(u,v)) d[v] = d[u]+w(u,v); 0 4 3 6 5 1 5 C S = {A, C}
Dijkstra’s Algorithm B 8 2 10 D A s Dijkstra(G) for each v V d[v] = ; d[s] = 0; S = ; Q = V; while (Q ) u = ExtractMin(Q); S = S U {u}; for each v u->Adj[] if (d[v] > d[u]+w(u,v)) d[v] = d[u]+w(u,v); 0 4 3 6 5 1 5 C S = {A, C, D}
Dijkstra’s Algorithm B 8 2 10 D A s Dijkstra(G) for each v V d[v] = ; d[s] = 0; S = ; Q = V; while (Q ) u = ExtractMin(Q); S = S U {u}; for each v u->Adj[] if (d[v] > d[u]+w(u,v)) d[v] = d[u]+w(u,v); 0 4 3 6 5 1 5 C S = {A, C, D, B}
Dijkstra’s Algorithm B 8 2 10 D A s Dijkstra(G) for each v V d[v] = ; d[s] = 0; S = ; Q = V; while (Q ) u = ExtractMin(Q); S = S U {u}; for each v u->Adj[] if (d[v] > d[u]+w(u,v)) d[v] = d[u]+w(u,v); 0 4 3 6 5 1 5 C
Dijkstra’s Algorithm Analyasis How many times is ExtractMin() called? Dijkstra(G) for each v V d[v] = ; d[s] = 0; S = ; Q = V; while (Q ) u = ExtractMin(Q); S = S U {u}; for each v u->Adj[] if (d[v] > d[u]+w(u,v)) d[v] = d[u]+w(u,v); A: O(E lg V) using heap for Q What will be the total running time?