Download
1 / 9
90 likes | 194 Views
SESAM – UAV seminarium 2004-02-11 Mari Persson. Optical guidance system Anders Eriksson / Magnus Johnsson. Optical guidance system based on computer vision. + Complete determination of vehicle position and orientation + AUV already equipped with camera (multi-purpose use)

E N D
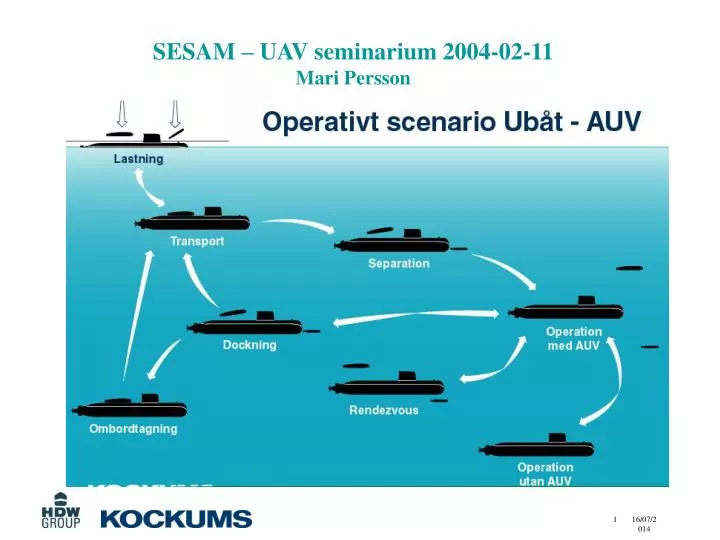
SESAM – UAV seminarium 2004-02-11 Mari Persson
Optical guidance system based on computer vision + Complete determination of vehicle position and orientation + AUV already equipped with camera (multi-purpose use) + Functionality mainly in software - Limited working range
Optical guidance system - Setup Driver Control 10 Power supply Ignition pattern
y x z 1m Track estimation
Detection range Baltic Sea: 60 m (simulated) Malmö Habour: 28 m (measured)
Conclusion • An underwater optical guidance system has been constructed and built • System performance has been evaluated • The achieved performance at full functionality is sufficient to guide an UUV during docking • The environment has a strong impact on the achieved working range