Download
1 / 37
370 likes | 492 Views
Lecture 38. Control of an Airport Shuttle Train. Modeling. Open loop control. Closing the loop. Simulations. We want an automated vehicle to drive from station to station in a closed loop, stopping at each station for a fixed interval. It needs to work unknown variable on-board mass.

E N D
Lecture 38. Control of an Airport Shuttle Train Modeling Open loop control Closing the loop Simulations
We want an automated vehicle to drive from station to station in a closed loop, stopping at each station for a fixed interval It needs to work unknown variable on-board mass This is a fancy extension of the cruise control problem and it is not amenable to the Ar approach we have been examining.
Let me start with modeling We can do what we need by looking at a single car shuttle Multiple cars can introduce some vibrations, but don’t do much to basic control Let’s suppose that we drive the system with an electric motor and let’s suppose that changes will be slow enough that we can neglect inductance The basic dynamics are the same as cruise control Let’s look at the pieces of this
The force comes from an electric motor. Let’s review that briefly
Simple dc motor equations torque rotation rate current back emf We will use, K1 = K = K2 input voltage - back emf = current xresistance (this assumes that i varies slowly enough that inductance is negligible)
t Here’s a block diagram of a motor attached to a load with moment I w e
In our case we are diving a linear motion (remember the overhead crane?) force on the shuttle the motor torque wheel radius The motor-supplied force
Generally motors are specified/advertised in terms of power, voltage, speed and current We want K and R, and we can get these using For example, given a 180 volt, 11 amp, 1500 watt, 1500 rpm motor, we’ll have (This is the motor we have used in a number of examples)
I can’t really choose a motor until I have some idea of the needs of the system The needs depend on the path we need to follow — y(t) — and the physical parameters defining the system
I’ll start with the path We’d like the shuttle to get from station to station quickly, but we cannot use too great an acceleration or the passengers will fall down My first constraint, then, is that the acceleration be less than some fraction g of gravity This turns out not to be much of a problem The path needs to be smooth: the acceleration needs to go to zero at each station My path will be 2 km long with intermediate stations at 500 m, 1000 m, and 1700 m
I need to introduce steps functions to make a single function for the whole trip The step functions have to be smooth approximations to actual step functions both for the sake of reality (no such thing as a step function) and for numerical calculations
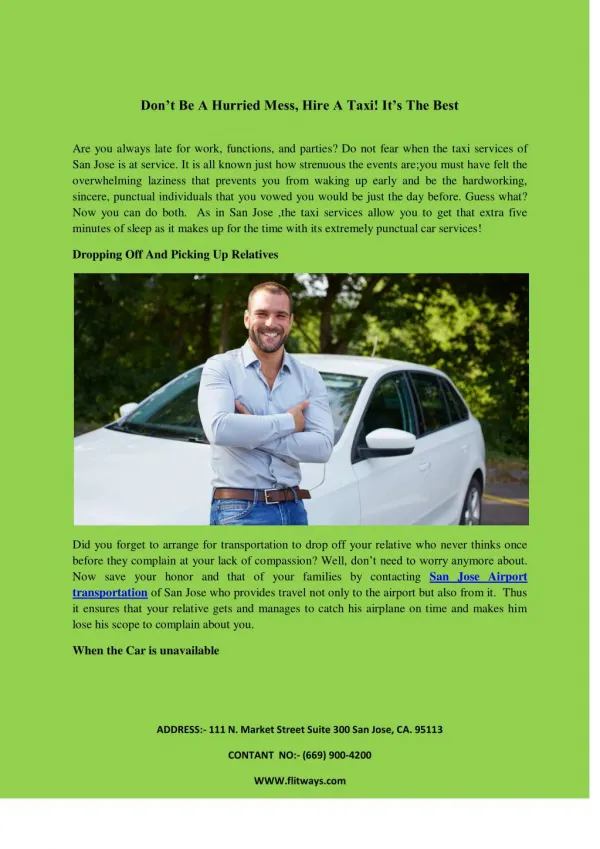
I chose a mean speed of 8 m/s and a dwell time of 45 seconds at each station The motion of the shuttle (distance vs. time) is
The acceleration divided by gravity is well below the specified 0.2g
Take a look at the dynamics we care about position, so we need to add to the set I’ve dropped the friction term as unimportant, and partly modeled by energy dissipated by the armature resistance.
At the design point We can find a design voltage Here are my design parameters
The motor must be capable of providing more than the maximum design acceleration We can use a 600 volt supply (the NYC subway, for example) If we have a top speed of 20 m/s, 75 kw power and a maximum current draw of 150 amps we will have K = 10, R = 0.67
We found that we needed an I term for the cruise control to cope with a constant disturbance. We have a different issue here. dynamics: Now we can add two variables to sneak up on control
We can find a reference voltage to go with the reference velocity and we can plug this into a simulation and see how it works
with Note that the actual problem has mass m, but the reference voltage has mass m0
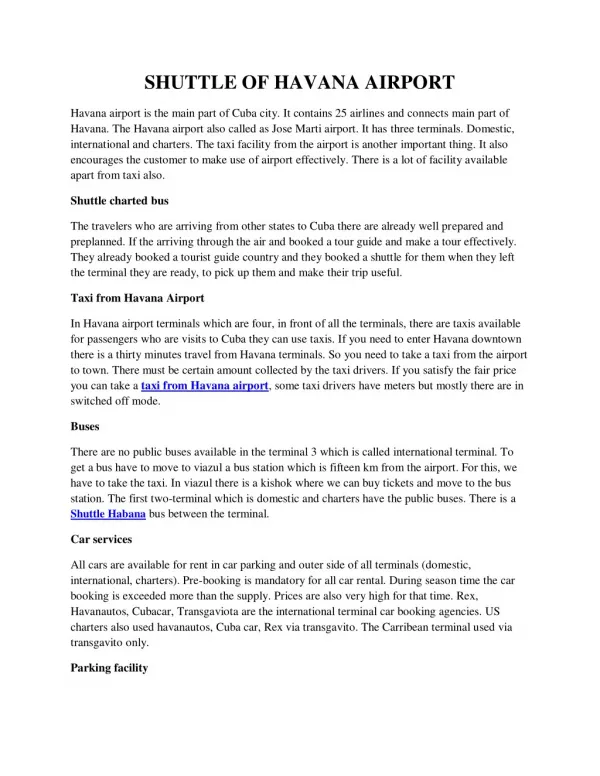
When the train is underloaded: m = 8 000 kg Stops are at: 625 m, 1250 m, 2125 m, and 2500 m
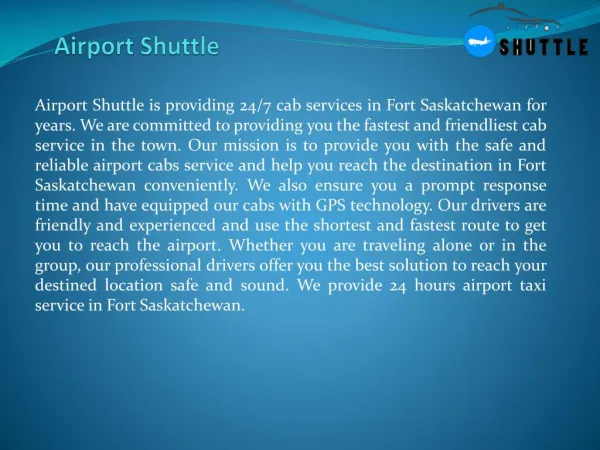
When the train is overloaded: m = 12 000 kg Stops are at 417 m, 833 m, 1417 m, and 1667 m
Rearrange the three governing equations This is very close to being in companion form — the nonlinear term kills it Let me attempt some idea of linearization and write
The first two equations go through unchanged The third equation requires a bit of work, and we need to go backwards a step substitute er will cancel a lot of this, and I can drop obviously nonlinear terms
And eliminate the reference state terms I don’t know m’, so there’s nothing I can do about it.
I can split e’ into two parts: one to kill the time-dependent part of this and the other to be the control Of course, we still have to find the gain matrix, which we can get as follows
From which we can find We can work directly from these, since they are so close to companion form
Three dimensional system, and the gains in terms of the poles are If I use Butterworth poles and put in numbers, I can test this on the two cases we’ve seen, and it works very well
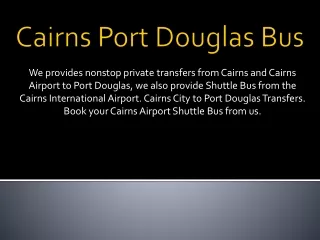
The stations for the controlled overload are at: 500.03 m, 1000.03 m, 1700.02 m, 2000.08 m
The stations for the controlled underload are at: 500.05 m, 1000.05 m, 1700.03 m, 2000.13 m
We can look at the overall voltage, which is not much changed from the original underload voltages overload voltages