Download
1 / 8
90 likes | 153 Views
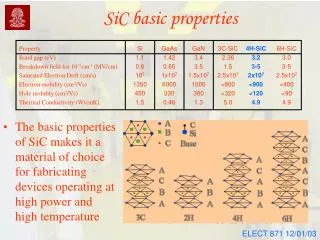
Understand basic properties like memory, invertibility, causality, stability, time invariance, and linearity in systems. Learn about memoryless systems, causal processing, stability analysis, and time invariance concepts. Dive into linear and non-linear systems in this comprehensive guide.

E N D
Memory • Invertibility • Causality • Stability • Time Invariance • Linearity
Memory • Memoryless • output for each value of independent variable at a given time is dependent on the input at only that same time y[n] = 2*x[n] - x^2*[n] memoryless • Capacitor is a C-T system with memory • In physical systems memory is directly associated with the storage of energy • y[n] = x[n-1] memory • D-T systems implemented with uP, memory is associated with storage registers • Memory typically suggests storing past values but definition covers systems with outputs dependant upon future values of input and output
Invertibilty & Inverse • Invertible • Distinct inputs lead to distinct outputs y[n] = 2*x[n] inverse system is y[n] = ½*x[n] • Noninvertible systems • y[n] = 0 violates distinct outputs • y(t) = x^2(t) can’t tell sign of input from the output • Encoding/Decoding • Lossless compression
Causality • Non-anticipative • Depends only on present and past values of inputs • Non-causal • output has a value before input • output responds to an input that hasn't occured yet • Causal y[n] = y[n-1], y[n] = Sk=-inf to n x[k] • Non-causal y[n] = x[n] – x[n+1], y(t) = x(t+1) • All Memoryless systems are causal – Why? • Causality not a constraint in image processing • In processing signals recorded previously (speech, geophysical, meterological) we are not constrained to causal processing • y[n] = x[-n] causal for n > 0 but what about n < 0? • y(t) = x(t)*cos(t+1) causal or noncausal?
Stability • Stable system • Small inputs lead to responses that do not diverge • Stable – pendulum • Unstable – inverted pendulum, bank account • BIBO – Bounded Input = Bounded Output • If we suspect a system is unstable • Look for a specific bounded input that leads to an unbounded output • One example proves unstable • If one example difficult to find use a different method • Try unit step on y(t) = tx(t)
Time Invariance • Behavior and characteristics fixed over time • R C circuit – same results today as tomorrow • System is Time Invariant if • A time shift in the input signal results in • Identical time shift in the output signal • A system is Time Invariant if • y[n]=x[n] and y[n-n0]=x[n-n0] • Examples • y(t) = sin[x(t)] • use t-t0 concept to prove • y[n] = nx[n] • use x[n]=d[n] & x[n]=d[n-1] to disprove • y(t) = 2x(t) ?
Linearity • A linear system is a system that possesses the important property of superposition • The response to x1(t) + x2(t) is y1(t) + y2(t) • The response to ax1(t) is ay1(t) • where a is any complex constant • Systems can be Linear without being Time Invariant • Systems can be Time Invariant without being Linear