Download
1 / 12
120 likes | 270 Views
Global Nonlinear Observers. Philip D. Olivier Electrical and Computer Engineering Mercer University. Outline. Introduction and Motivation Newton Raphson Observers Confidence Levels Example Further Issues Other Output Functions Conclusions Acknowledgements. Introduction and Motivation.

E N D
Global Nonlinear Observers Philip D. Olivier Electrical and Computer Engineering Mercer University 2004 Southeastern Symposium on System Theory
Outline • Introduction and Motivation • Newton Raphson Observers • Confidence Levels • Example • Further Issues • Other Output Functions • Conclusions • Acknowledgements 2004 Southeastern Symposium on System Theory
Introduction and Motivation • Segmented mirror telescopes • Linear dynamics, nonlinear output • Local linearizations are not observable • Simplified problem to be considered in this paper • Super simplified motivational example 2004 Southeastern Symposium on System Theory
Super Simplified Motivational Example Measure Compute possible states Now command a) the system; b) the z1+ estimator; c) the z1- estimator; to move u2=-1 Prior to new measurement, the new estimates become z2+=2-1=1 z2-=-2-1=-3 The corresponding estimated outputs are: y2+=1 y2-=9 Which estimate is it? New Measurement: y2=1 Which estimate is it? 2004 Southeastern Symposium on System Theory
Newton Raphson Observers • After each measurement, need to solve the nonlinear output equation for multiple roots. • Newton-Raphson iteration is convenient root finding technique. • Roots of what function? 2004 Southeastern Symposium on System Theory
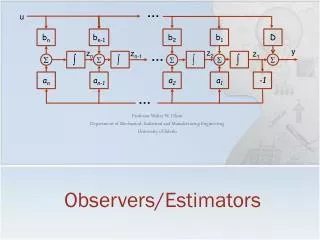
Modified output function • Other options considered later. 2004 Southeastern Symposium on System Theory
Confidence Levels • Multiple estimators. • Which is the “BEST” estimator? • Confidence levels • Fuzzy logic • Max confidence estimate? • Blended estimate? 2004 Southeastern Symposium on System Theory
Example 2004 Southeastern Symposium on System Theory
Further Issues • How many candidates? • After convergence, how many candidates? • MAX defuzzifier used here. Others? • Input and measurement noise? 2004 Southeastern Symposium on System Theory
Other Output Functions 2004 Southeastern Symposium on System Theory
Conclusions • Which G(x) =0 to solve? • How many observers are needed in the observer bank and how to choose initial conditions for each? • How should the confidence levels be chosen? • How should the various estimators be combined to produce a single “best” estimator? • If the G(x) = 0 includes a design parameter, how should the parameter be chosen? • At what point, if any, can an estimator bank be reduced in size? • At what point, if any, can the control law be changed? i.e. can the control law be made adaptive so that the control law coefficient increases with the confidence in the estimator? • This formulation used the zero state to seed the estimators. Should the initial guesses associated with the estimators have been used instead? 2004 Southeastern Symposium on System Theory
Acknowledgements • Georgia Space Grant Consortium • NASA’s Marshal Space Flight Center • Sandy Montgomery • John Racozy • Glenn Zeiders 2004 Southeastern Symposium on System Theory