Download
1 / 30
300 likes | 434 Views
Lead, Follow, or Get in the Way. Creating Social Agent Systems in Simulated Physical Environments Principal Investigator: Dr. Ben Aguirre Research Assistant: Eric Best (ericbest@udel.edu). 1. Why Social Agent Systems?.

E N D
Lead, Follow, or Get in the Way Creating Social Agent Systems in Simulated Physical Environments Principal Investigator: Dr. Ben Aguirre Research Assistant: Eric Best (ericbest@udel.edu) 1
Why Social Agent Systems? • Most simulations create a number of avatars that are largely homogeneous and do not have linked goals. • Based on our research, we believe this is an inaccurate way to create models of human beings. 2
Disaster Research Center Work • Based on our work at the Disaster Research Center (DRC), we have found that people evacuating a hazard do not rely on individual goals and behaviors. • Group behaviors and crowd behaviors impact goals and reasoning. 3
Why Group Behavior? • Historically, the DRC has found that evacuees use social behavior when assessing and reacting to hazards. • Social bonds are not ignored when dangers are present. • Individual, social, and crowd behaviors interact together to influence decisions and goals. 4
Why Group Behavior? • Recently, Dr. Ben Aguirre conducted a study that gathered detailed information about the victims and evacuees of The Station Nightclub fire. • We are aware of detailed exit goals, social behaviors, and networks among victims and evacuees. 5
Why Group Behavior in ABM? • Using this detailed dataset, we chose to create a set of models incorporating social behavior to replicate the immediate reaction to the disaster at The Station. • Eventually, we hope to encourage other model builders to consider group behavior and non-homogenous agents. 6
Why Group Behavior in ABM? • Humans do not interact in a vacuum, but most simulations of humans account only for individual behavior. • Agent-Based modeling with learning agents is an obvious avenue for creating simulations with evolving group behavior models. 7
Our Agent-Based Models • Model builders are largely ignoring group and crowd behaviors, so we set out to build a model incorporating social behavior models. • Today, we will discuss some of the conceptual and practical issues that must be addressed when creating models with group behavior attributes. 8
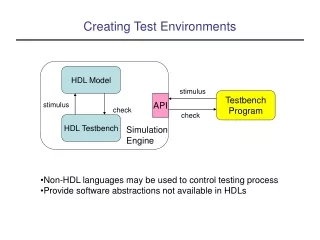
In Practice • One of several first efforts in physical social agent simulation • Several benchmarks 9
In Practice • Goals for model creation: • Benchmark current models and actual results. • Analyze data and create an individual behavior model. • Create models with group behavior attributes. • Apply framework to other situations. 10
Benchmarking • For The Station, we have a detailed dataset with results that we can compare to output from models of the disaster. • There are several models that have been created about The Station, many with a different focus, but none with social behavior. • We have exit data and exit time data. Most results compare flow rates in aggregate. 11
Analysis • The DRC conducted a study gathering highly detailed data of victims and evacuees, including social bonds to other participants. • Using this data, we were able to approximate the likelihood of behavior changes based on different social bonds. 12
Individual Behavior Model • Like many others, we created a model with individual behavior. • This became our personal benchmark. If we can control all of the parameters, we can see the exact impacts of adding group behavior traits. • Our individual behavior model has similar flow rates to data results and prior models. 13
Background • We began with an issue of geography. We had to create an accurate environment of The Station. For now in two dimensions. • We then added hazards, reasons to leave the building. • We then created our avatars, or agents. 14
Agents • Our avatars have different behaviors based off of observed traits, such as age, gender, familiarity with the environment, and other factors. They are not homogenous. • Every avatar has a large set of constraints, such as the inability to move through walls. • Avatars also have to navigate in the changing environment due to other avatars moving. 15
Adding Behavior Layers • Once our individual behavior model was running, we added other layers: • Individual layer. • Social group layer. • Crowd layer. 16
Adding Social and Group Behaviors • After creating an individual behavior model, we began to add group elements. • Almost immediately, our efficiency plummeted, avatars stopped exiting, and our results made little sense when examined by a human. 17
What Happened? • It is easy to forget that computers are not nearly as smart as you are. • Every time you add a variable to an agent's decision tree, you have to account for interactions. • Conflicting goals will render a machine's reasoning system useless unless they are programmed to perform an action or prefer a result. 18
What Happened? • The moment the actions of other avatars matter to an agent, a high number of interaction variables emerge. • A simple first-order interaction of 500 agents creates 125,250 unique relationships. • Adding additional complications can increase interactions exponentially. 19
Where to begin? • Before you can create rules or preferences, you have to identify the issues. • The simplest interactions can be hard to quantify. 20
Building a Model • There is a multi-step process of conceptualization, implementation, and robustness testing. • This process is inherently interdisciplinary. 21
Complications • These physical issues quickly become difficult computational and judgement problems. • Simple group movements require constant recalculation 22
Complications • Individual, group, and crowd behaviors create large numbers of scheduling issues and interactions that must be understood. 23
Complications • Reasoning that humans take for granted is often difficult to implement in computerized systems. • It is not feasible to truly simulate humans, so it becomes important to focus on a few programmable traits. • How are social traits programmable? 24
Complications • Here is an example meant to relay the concept of object permanence. • How do you teach this to a computer, or even communicate it to a programmer? 25
An Interdisciplinary Approach • Identifying and coding behaviors merges ideas and techniques from sociology, psychology, computer science, economics, and statistics among others. • The DRC is uniquely positioned to accept these challenges thanks to strong interdisciplinary programs and expertise sharing. 26
Where Does ABM Fit In? • Agents that can interact together are a natural fit for physical environment simulations. In theory, they just require one more layer of rules to create a physical reality. • In practice, group behavior interactions and physical limitations are going to keep a young field busy for quite awhile. Humans are more difficult to simulate than one might imagine. 27
How Do We Make Working Models? • Hurdles: • High-Performance Computing: Relationships tax computing resources. Thankfully, we now have parallel systems and GPU computing. • Peer Review: Designers are reluctant to share code, and even if shared, it is often difficult to understand. Debugging is very time intensive. • What attributes to code: Who decides what aspects of group behavior are important? 28
Where Are We Today? • Currently, I spend most of my time tackling the third issue; which traits are most important to include. • To begin, I created a version of our model with a simple leader/follower group model. • These groups are small social dictatorships, where followers pattern a leader exhibiting an individual behavior model. 29
Where Will We Go? • Our eventual goal is to implement distributed social behavior models, approximating complex social relationships. • These models will have decentralized and robust leadership, much like networked computer systems. • Beyond groups, we will incorporate crowd models. 30