Download

1 / 18
180 likes | 353 Views
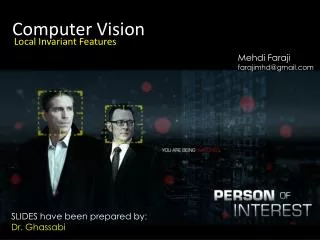
コンピュータビジョン Computer Vision(CV) パワーポイント 抜粋. 予測符号化のブロック図. 伝送路. 入力 信号. 出力 信号. ー. 量子化. ・. +. ・. 予測. +. 予測. 符号化側. 復号化側. 演習.

E N D
コンピュータビジョンComputer Vision(CV)パワーポイント 抜粋
予測符号化のブロック図 伝送路 入力 信号 出力 信号 ー 量子化 ・ + ・ 予測 + 予測 符号化側 復号化側
演習 次の直交基底に展開せよ. F1 = (1,1,1,1), F2=(1,1,-1,-1), F3=(1,-1,-1,1) 1. ƒ = (8, 2, 0, 6) 2. g = (3, 6, 2, 0) 展開した値から関数を合成せよ.
DCTと逆DCT DCT係数 ƒ= (8,2,0,6) = aF1+bF2+cF3
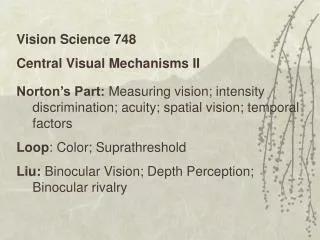
DCT係数の一様量子化特性 量子化値 3 2 1 DCT係数 -1 -2 -3
量子化マトリクス(イントラマクロブロック用)量子化マトリクス(イントラマクロブロック用) 8 16 19 22 26 27 29 34 16 16 22 24 27 29 34 37 19 22 26 27 29 34 34 38 22 22 26 27 29 34 37 40 22 26 27 29 32 35 40 48 26 27 29 32 35 40 48 58 26 27 29 34 38 46 56 69 27 29 35 38 46 56 69 83
DCT係数 をもつ画像がある。DCT係数 をもつ画像がある。 レポート1 2次元の直交基底 1.Gを逆DCT変換した画像を求めよ。 2.Gを量子化テーブル で量子化し、画像を復元せよ。 3.Gを で量子化し、画像を復元せよ。
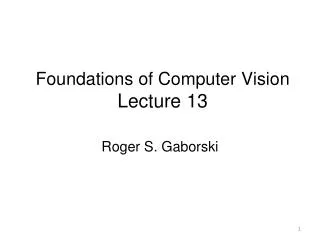
第(tー1)フレーム 第 t フレーム ブロックマッチングによる動き 検出と画像圧縮への応用
左画像 右画像 領域内の 平均明度 領域照合の評価関数 相関係数 SSD(Sum of Squared Difference) SAD(Sum of Absolute Difference) Modified SSD
GOPのフレーム(ピクチャ)構成(Group Of Picture) B0 B1 I2 B3 B4 P5 B6 B7 P8….B12 B13 P14 I2 B0 B1 P5B3 B4 P8 B6 B7…P14B12 B13 フレーム内予測 フレーム間予測 双方向フレーム間予測 I2 B0 B1 P5B3 B4 P8 B6 B7….P14B12 B13 B0 B1 I2 B3 B4 P5 B6 B7 P8…. B12 B13 P14
GOPのフレーム(ピクチャ)構成(Group Of Picture) B0 B1 I2 B3 B4 P5 B6 B7 P8…B12 B13 P14 I2 B0 B1 P5B3 B4 P8 …P14B12 B13 フレーム内予測 フレーム間予測 双方向フレーム間予測 I2 B0 B1 P5B3 B4 P8 B6 B7….P14B12 B13 B0 B1 I2 B3 B4 P5 B6 B7 P8….B12 B13 P14