Download
1 / 7
70 likes | 245 Views
Locomotion Phase: Propulsion System X1. February 5, 2009. Drive Train Sizing for X1. 4 Independent Drive Wheels Selection Criteria Power Input/ Output Size/ Weight Strength Environmental Capabilities Cost. Results. *Based on current exchange rate of 1.00 EUR=1.28 USD.

E N D
Locomotion Phase:Propulsion System X1 February 5, 2009 Ryan Lehto Propulsion Locomotion CAD Designer
Drive Train Sizing for X1 Ryan Lehto Propulsion • 4 Independent DriveWheels • Selection Criteria • Power Input/ Output • Size/ Weight • Strength • Environmental Capabilities • Cost
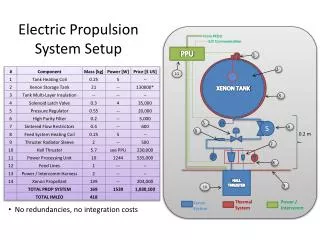
Results *Based on current exchange rate of 1.00 EUR=1.28 USD Ryan Lehto Propulsion • Motor: MaxonDC Precious Metal Brushes Motor • Max Output: 2.5W • Gearing: Planetary GearheadRatio of 3373:1 • Controller: LSC 30/2, linear 4-Q-Servoamplifier 30 V / 2 A • Energy Needed: ~42.82 W*hrs • System Mass: 1.2742 kg • Mission Time: 0.03m/s 4.63 hrs • Max Temp.: Up to 125°C • Total Cost: 4*(Motors + Gears) + Controller= *$694.00
Back-up All information from http://shop.maxonmotor.com/ishop Ryan Lehto Propulsion
Motor Efficiency: 78.3% Gearing Efficiency: 68% Ryan Lehto Propulsion
Power Needed Per Wheel: 0.77325 W Motor Has Max RPM 10100 Gearing Reduction: 3373:1 Max Wheel Rotation: 2.99 Ryan Lehto Propulsion
Sources: Clark, D., & Owings, M. (2003). Building Robot Drive Trains. New York. McGraw-Hill MaxonMotor website: http://www.maxonmotorusa.com/ Currency Exchange Rate Found at: www.xe.com Ryan Lehto Propulsion