Download
1 / 45
450 likes | 677 Views
PCA Extension. By Jonash. Outline. Robust PCA Generalized PCA Clustering points on a line Clustering lines on a plane Clustering hyperplanes in a space. Robust PCA. Rrbust Principal Component Analysis for Computer Vision Fernando De la Torre Mochael J. Black CS, Brown University.

E N D
PCA Extension By Jonash
Outline • Robust PCA • Generalized PCA • Clustering points on a line • Clustering lines on a plane • Clustering hyperplanes in a space
Robust PCA • Rrbust Principal Component Analysis for Computer Vision • Fernando De la Torre • Mochael J. Black • CS, Brown University
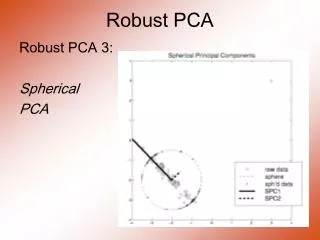
Robust Statistics • Recover the best fit for the majority of the data • Detect and reject outliers
Robust PCA • Training images
Robust PCA • Naïve PCA • Simply reject • Robust PCA
RPCA • In traditional PCA, we minimize • Σni = 0 (di – B BT di)2 = Σni = 0 (di - Bci)2 • EM PCA Limσ -> 0(D = BC + σ2I) E-step C = (BTB)-1BTD M-step B = DCT(CCT)-1 BBTdi di B BTdi = ci
RPCA • Xu and Yuille [1995] tries to minimize • Σni = 1 [ V i(di – B ci)2 + n(1-Vi) ] • Hard to solve (continuous + discrete)
RPCA • Gabriel and Zamir [1979] tries to minimize • Σni = 1 Σdp = 1 [ wpi(dpi – Bci)2] • Impratical for high dimension • “Low rank approximation of matrices by least squares with any choice of weights” 1979
RPCA • Idea is to use a robust function ρ • Geman-McClureρ (x,σ) = x2/(x2 + σ2) • Σni = 1 Σdp = 1 ρ[ (dpi–μp –Σkj = 1 bpjcji), σp] • Approximated by local quadratic function • Use gradient descent • The rest is nothing but heuristics
Robust PCA - Experiment • 256 training images (120x160) • Obtain 20 RPCA basis • 3 hrs on 900MHz Pentinum III in Matlab
Outline • Robust PCA • Generalized PCA • Clustering points on a line • Clustering lines on a plane • Clustering hyperplanes in a space
Generalized PCA • Generalized Principal Component Analysis • Rene Vidal • Yi Ma • Shankar Sastry • UC Berkley and UIUC
GPCA Goals • # of subspaces and their dimension • Basis for subspace • Segmentation of data
GPCA Ideas • Union of subspaces = certain polynomials
Outline • Robust PCA • Generalized PCA • Clustering points on a line • Clustering lines on a plane • Clustering hyperplanes in a space
GPCA 1D Case Cont’d MN = n+1 unknowns To have a unique solution, rank(Vn) = n = Mn- 1
GPCA 1D Example • n = 2 groups • pn(x) = ( x – μ1) ( x – μ2) • No polynomial of degree 1 • Infinite polynomial of degree 3 • pn(x) = x2 + c1x + c2 => Polynomial factor
Outline • Robust PCA • Generalized PCA • Clustering points on a line • Clustering lines on a plane • Clustering hyperplanes in a space
GPCA 2D Case • L j = { X = [x, y]T: bj1x + bj2y = 0 } • (b11x + b12y = 0) or (b21x + b22y = 0)…
GPCA 2D Case Cont’d • (b11x + b12y = 0) or (b21x + b22y = 0)… • Pn(x) = (b11x + b12y)…(bn1x + bn2y) = 0 = Σck xn-k yk
GPCA 2D Case Cont’d • Take n = 2 for example… • p2(x) = (b11x + b12y)(b21x + b22y) • ▽p2(x) = (b21x + b22y)b1 + (b11x + b12y)b2 , bj = [bj1, bj2] T • if x ~ L1, then ▽p2(x) ~ b1, otherwise ~ b2
GPCA 2D Case Cont’d • Given that {yjε Lj}, the normal vectorof Ljis bj ~ ▽pn(yj) • 3 things… • Determine “ n ” asmin{ j: rank(Vj) = j } • Solve cnfor Vncn = 0 • Find normal vector bj
Outline • Robust PCA • Generalized PCA • Clustering points on a line • Clustering lines on a plane • Clustering hyperplanes in a space
GPCA Hyperplanes • Still assume d1 = … = dn = d = D – 1 • Sj = { bjTx = bj1x1 + bj2x2 + … + bjDxD = 0}
GPCA Hyperplanes MN = C(D+n-1, D)
GPCA Hyperplanes • Since we know n, we can solve for ck • ck => bkby ▽pn(x) • If we know yj on each Sj, finding bj will be easy
GPCA Hyperplanes • One point yj on each hyperplane Sj • Consider a random line L = t * v + x0 • Obtain yj by intersecting L and Sj • yj = tj * v + x0 • Find roots tj by … Pn(t v + xo)
GPCA Hyperplanes • Summarize • We want to find n to solve for c • To get b (normal) for each S, find ▽pn(x) • To get label j, solve pn(yj = tj * v + x0) = 0
One More Thing • Previously we assume d1 = … =dn= D – 1 • Actually we cannot assume that… • Please read section 4.2 & 4.3 … by yourself • Discuss how to recursively reduce dimension