Download
1 / 29
290 likes | 303 Views
Learn about multiple key indexes, B-Trees, KD-Trees, Quad Trees, R-Trees for efficient data querying and storage in databases. Explore strategies for partial match, range, and nearest neighbor queries.

E N D
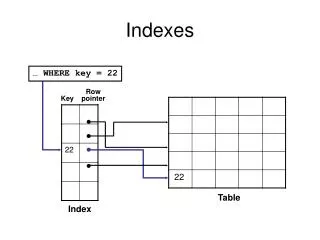
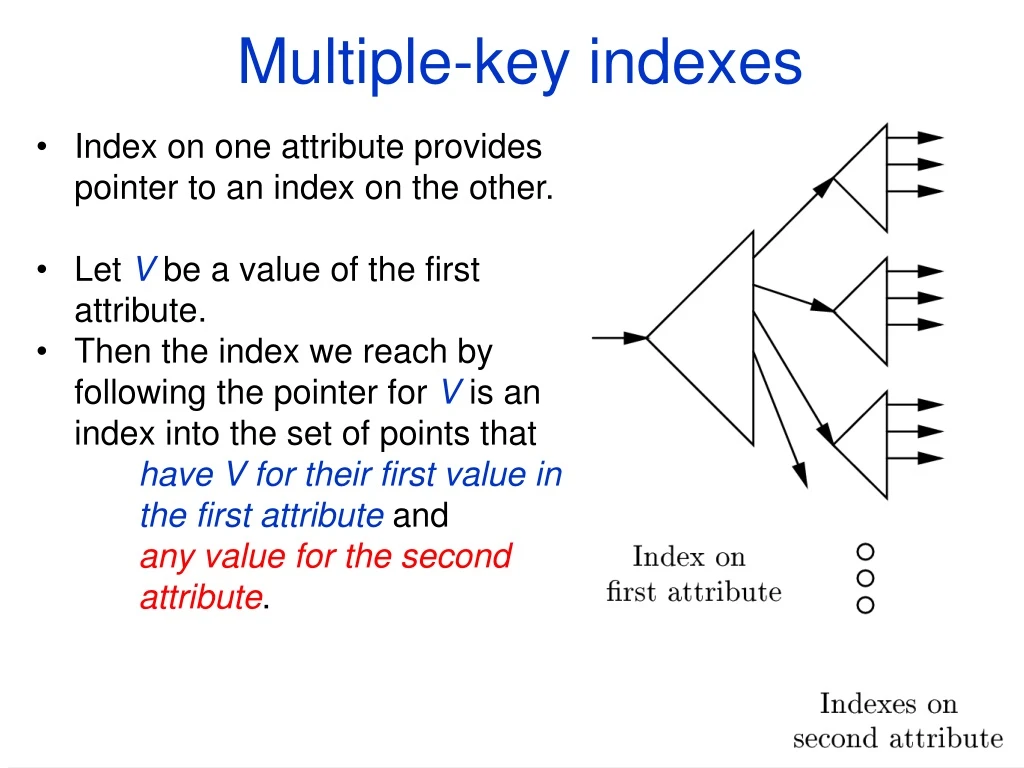
Multiple-key indexes • Index on one attribute provides pointer to an index on the other. • Let V be a value of the first attribute. • Then the index we reach by following the pointer for V is an index into the set of points that have V for their first value in the first attribute and any value for the second attribute.
Example • “Who buys gold jewelry” (age and salary only). Raw data in agesalary pairs: (25; 60) (45; 60) (50; 75) (50; 100) (50; 120) (70; 110) (85; 140) (30; 260) (25; 400) (45; 350) (50; 275) (60; 260) • Question: For what kinds of queries will a multiplekey index (age first) significantly reduce the number of disk I/O's? The indexes can be organized as B-Trees.
Operations Partial match queries • If the first attribute is specified, then the access is quite efficient • If the first attribute isn’t specified, then we have to search every sub-index. Range queries • Quite well, provided the individual indexes themselves support range queries on their attribute (e.g. they are B-Trees) • Example. Range query is 35age55 AND 100sal200 NN queries • Similar to range queries. Also, the indexes should be “primary” ones if we want to support efficiently range queries.
KD-Trees • Levels rotate among the dimensions, partitioning the points by comparison with a value for that dimension. • Leaves are blocks holding the data records.
Geometrically… • Remember we didn’t want the stripes in grid files to continue all along the vertical or horizontal direction? • Here they don’t.
Operations Lookup in KDTrees • Find appropriate leaf by binary search. Is the record there? Insert Into KDTrees • Lookup record to be inserted, reaching the appropriate leaf. • If there is room, put record in that block. • If not, find a suitable value for the appropriate dimension and split the leaf block using the appropriate dimension. Example • Someone 35 years old with a salary of $500K buys gold jewelry. • Belongs in leaf with (25; 400) and (45; 350). • Too full: split on age. See figure next.
Someone 35 years old with a salary of $500K buys gold jewelry. It’s “age” turn to be used for split. Split at 35; it’s the median.
Queries Partial match queries • When we don’t know the value of the attribute at the node, we must explore both of its children. • E.g. find points with age=50 Range Queries • Sometimes a range will allow us to move to only one child of a node. • But if the range straddles the splitting value then we must explore both children.
KD-trees in secondary storage • If internal nodes don’t fit in main memory group them into blocks.
400 Sal g b h d e a k c f j l i Age 50, Sal 200 0 Age 100 i h c e Age 75, Sal 100 Age 25, Sal 300 a b f g l j k d Quad trees • Nodes split at all dimensions at once • For a quad tree of k dimensions, each interior node has 2k children.
Why quad trees? • k-dimensions node has 2k children, e.g. k=7 128 children. • If 128, or 27, pointers can fit in a block, then k=7 is a convenient number of dimensions.
QuadTree Insert and Queries Insert • Find leaf node in which new point belongs. • If room, put it there. • If not, make the leaf an interior node and give it leaves for each quadrant. Split the points among the new leaves. • Problem: may make lots of null pointers, especially in highdimensions. QuadTree Queries • Single point queries: easy; just go down the tree to proper leaf. • Range queries: varies by position of range. • Example: a range like 45<age<55; 180<salary<220 requires search of four leaves. Nearest neighbor: Problems and strategies similar to grid files.
R-Trees • For “regions” (typically rectangles) but can represent points. • Supports NN, “whereamI” queries. • Generalizes Btree to multidimensional case. • In place of Btree's keypointer pairs, Rtree has regionpointer pairs.
Lookup – Where Am I? • We start at the root, with which the entire region is associated. • We examine the subregions at the root and determine which children correspond to interior regions that may contain point P. • If there are zero regions we are done; P is not in any data region. • If there are some subregions we must recursively search those children as well, until we reach the leaves of the tree.
Insertion Inserting region R. 1. We start at the root and try to find some subregion into which R fits. • If more than one we pick just one, and repeat the process there. 2. If there is no region, we expand, and we want to expand as little as possible. • So, we pick the child that will be expanded as little as possible. 3. Eventually we reach a leaf, where we insert region R. 4. However, if there is no room we have to split the leaf. • We split the leaf in such a way as to have the smallest subregions.
Example • Suppose that the leaves have room for six regions. • Further suppose that the six regions are together on one leaf, whose region is represented by the outer solid rectangle. • Now suppose that another region POP is added.
Example (Cont’ ed) ((0,0),(60,50)) ((20,20),(100,80)) Road1 Road2 House1 School House2 Pipeline Pop
Example (Cont’ ed) • Suppose now that House3 ((70,5),(80,15)) gets added. • We do have space to the leaves, but we need to expand one of the regions at the parent. • We choose to expand the one which needs to be expanded the least.
We chose this option because it produces the smallest increase in total surface area Which one should we expand? ((0,0),(80,50)) ((20,20),(100,80)) Road1 Road2 House1 House3 School House2 Pipeline Pop Two choices: ((0,0),(60,50)) ((20,5),(100,80)) Road1 Road2 House1 School House2 Pipeline Pop House3
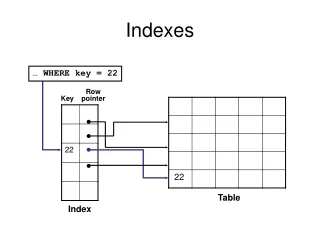
Bitmap Indexes • Suppose we have n tuples. • A bitmap index for a field F is a collection of bit vectors of length n, one for each possible value that may appear in the field F. • The vector for value v has 1 in position i if the i-th record has v in field F, and it has 0 there if not. (30, foo) (30, bar) (40, baz) (50, foo) (40, bar) (30, baz) foo 100100 bar 0… baz …
Graphical Picture Customer table. We will index Gender and Rating. Note that this is just a partial list of all the records in the table Two bit strings for the Gender bitmap Five bit strings for the Rating bitmap
Bitmap operations • Bit maps are designed to support partial match and range queries. How? • To identify the records holding a random subset of the values from a given dimension, we can do a binary OR on the bitmaps from that dimension. • For example, the OR of bit strings for Age = (20, 21, 22) • To identify the partial matches on a group of dimensions, we can simply perform a binary AND on the OR’d maps from each dimension. • These operations can be done very quickly since binary operations are natively supported by the CPU.
1 0 1 1 0 1 1 1 OR = 0 1 1 1 1 1 0 0 1 1 0 0 0 0 1 1 1 1 AND = 0 First two records in our fact table are retrieved 0 Bit Map example SELECT * FROM Customer WHERE gender = M AND (rating = 3 OR rating = 5)
Gold-Jewelry Data (25; 60) (45; 60) (50; 75) (50; 100) (50; 120) (70; 110) (85; 140) (30; 260) (25; 400) (45; 350) (50; 275) (60; 260) What would be the bitmap index for age, and the bitmap index for salary? • Suppose we want to find the jewelry buyers with an age in the range 45-55 and a salary in the range 100-200. What do we do?
How big do these things get? • Assuming each attribute value fits in a 32-bit machine word, the bitmap index for an attribute with value cardinality 32 takes as much space as the base data column. • Since a B-tree index for a 32-bit attribute is often observed to use 3 or 4 times the space as the base data column, many users consider attributes with cardinalities less than 100 to be suitable for using bitmap indices. • However, some other users believe bit map indexes are good for attributes with cardinalities more than 100. What can be done?
Basic Compression • Run length encoding is used to encode sequences or runs of zeros. • Say that we have 20 zeros, then a 1, then 30 more zeros, then another 1. • Naively, we could encode this as the integer pair <20, 30> • This would work. But what is the problem? • On a typical 32-bit machine, an integer uses 32 bits of storage. So our <20, 30> pair uses 64 bits. The original string only had 52! • So we must use a technique that stores our run-lengths as compactly as possible. • Let’s say we have the string 000101 • This is made up of runs with 3 zeros and 1 zero. • In binary, 3 = 11, while 1 is, of course, just 1 • This gives us a compressed representation of 111. • The problem? • How do we decompress this? • We could interpret this as 1-11 or 11-1 or even 1-1-1. • This would give us three different strings after the decompression.
Example: 000000000000010000001 • Here we have two “0” runs of length 13 and 6 • 13 can be represented by 4 bits, 6 requires 3 bits • Run 1: j – 1 “1” bits + 0 + i → 111 0 1101 • Run 2: j – 1 “1” bits + 0 + i → 11 0 110 • Final compressed string: 11101101110110 • Compression rate: (21-14)/21 = 33% Proper RLE encoding • Run of length i has i 0’s followed by a 1. • So how does RLE store the run lengths? • Let’s say that that we have a run of length i. • We set j = the number of bits required to represent i. • To define a run, we actually use two values: • The “unary” representation of j • A sequence of j – 1 “1” bits followed by a zero (the zero signifies the end of the unary string) • The special cases of j = 0 and j = 1 use 00 and 01 respectively. • The value i
Decoding • Let’s decode 11101101001011 11101101001011 13 11101101001011 0 11101101001011 3 Our sequence of run lengths is: 13, 0, 3. What’s the bitmap? 0000000000000110001
Summary Pros: • Bitmaps provide efficient storage for low cardinality dimensions. On sparse, high cardinality dimensions, compression can be effective. • Bit operations can support multi-dimensional partial match and range queries Cons: • De-compression requires run-time overhead • Bit operations on large maps and with large dimension counts can be expensive.