Download
1 / 38
380 likes | 687 Views
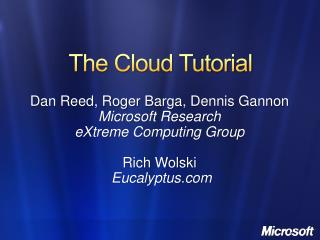
Spring Semester, 2011. Ubiquitous Computing Practice - Part I (Introduction, NesC) -. Laboratory of Intelligent Networks @ KUT ( http://link.kut.ac.kr ) Yong-hwan Kim. Application. Customer. API. Security 32- / 64- / 128-bit encryption. Zigbee Alliance. Network

E N D
Spring Semester, 2011 Ubiquitous Computing Practice- Part I (Introduction, NesC) - Laboratory of Intelligent Networks@ KUT (http://link.kut.ac.kr) Yong-hwan Kim
Application Customer API Security 32- / 64- / 128-bit encryption Zigbee Alliance Network Star / Mesh / Cluster-Tree MAC IEEE 802.15.4 PHY 868MHz / 915MHz / 2.4GHz Stack Silicon App Zigbee IEEE 802.15.4 - Low Rate Wireless Personal Networks - radio hardware 사용법 - RF channel and signaling protocol Zigbee - 802.15.4 의 상위 layer 정의 - 디바이스 간 통신 프로토콜 정의
Hanback ZigbeX • Computing • ATmega128L microcontroller • 128KB Flash program memory • 4KB SRAM, 10bit ADC • Radio Transceiver • Ti(Chipcon)사의 CC2420 • Radio range: 130m (30m) • Data rate: 250 Kbits/sec • Frequency range: 2.4 GHz (ISM)
옵션 장비들 기상 보드 릴레이 보드 홈 보드 GPS 블루투스 보드 모터 제어보드 LCD 보드 초음파 보드
TinyOS • TinyOS • 미국 UC Berkeley 대학에서 개발된 무선 센서 네트워크를 위한 전용 운영체제 • 무선 센서 노드의 일반적인 특징(최소한의 하드웨어, 작은 메모리, 낮은 CPU 성능, 한정된 에너지)을 고려하여 설계된 운영체제 • 클래스 형태의 컴포넌트 구조를 갖는 nesC로 구현됨 • Event driven 기반 • 단일 스택, 커널 없음, 동적 메모리 관리 없음 • 사용하지 않는 CPU 사이클 동안 Sleep 상태로 들어가 불필요한 전력소모 줄임(“Hurry up and Sleep”) • 함수 단위의 task, 비선점형 FIFO 스케줄링
TinyOS • TinyOS • Concurrency(병렬성) • event 구동형의 architecture 사용 • Modularity(모듈성) • Application은 components의 graph로 구성 • OS + Application은 하나의 프로세스로 실행될 수 있게 컴파일 (기존의 OS위에 Application을 올리는 방식과 다름) • Code communication • Event/command model을 사용 → function calls로 번역 • FIFO and 우선권이 없는 스케줄링 • Kernel과 Application 사이에 경계가 없다 • No Kernel → Direct hardware manipulation, • No process/memory management • Application = scheduler + graph of components
TinyOS Process Categories • Event • Time Critical • Interrupts cause Event (Timer, Sensors) • Small / short duration • Suspend Tasks • Task • Time Flexible • Run sequentially by TOS Scheduler • Run to completion • Interruptible • Non pre-emptible by other task, pre-emtible by events
TinyOS 디렉토리 구조 하드웨어 칩셋과 관련된 컴포넌트들이 모인 폴더 여러 종류의interface 선언 파일들이 모인폴더 다양한high level 라이브러리들이 모인 폴더 센싱과 관련된 컴포넌트들이 모인 폴더 일반적이고 다양한 커널 컴포넌트 및 몇 개의 유틸리티 하드웨어 플랫폼에 관련된 컴포넌트들이 모인 폴더
NesC • nesC(networked embedded systems C) • TinyOS의 실행 모델과 구조적 개념을 표현하기 위하여 C언어를 확장하여 만든 새로운 언어 • 여러개의 컴포넌트 블록(block)들을 연결하여 하나의 애플리케이션 형태로 조합
Interface(1) • Interface • Provider와 user component를 연결하는 port 역할 • Command와 event타입의함수로 정의 interface identifier { command result_t funtion_name( … ); event result_t funtion_name( … ); }
Interface(2) • 예) TimerMilliC component의 interface인 Timer interface Timer<precision_tag> { // 밀리초 단위의 시간마다 주기적으로 알려주도록 설정하는 함수 command void startPeriodic(uint32_t dt); // 밀리초 단위의 시간 후에 한 번만 알려주도록 설정하는 함수 command void startOneShot(uint32_t dt); // 설정한 시간을 취소하는 함수 command void stop(); // 시간이 만기되었음을 알려주는 함수 event void fired(); … } BlinkTimerM component command event interface TimerMilliC component
Interface(3) • Interface 종류 • Read.nc ADC 인터페이스 • I2CPacket.nc I2C버스 프로토콜 인터페이스 • Leds.nc LED 추출 인터페이스 • LogWrite.nc 저장장치에 logging 데이터 위한인터페이스 • Radio.nc 무선 하드웨어를 위한 비트 레벨인터페이스 • Send.nc 일반적 메시지 인터페이스 수신 • Receive.nc 일반적 메시지 인터페이스 송신 • Timer.nc 일반적 타이머 제어 인터페이스 • StdControl.nc 표준 component 제어 인터페이스
Component • Component • 다른 컴포넌트와의 연결에 대한 내용을 정의 • 연결에 사용할 컴포넌트를 나열하고 그들 간의 연결을 기술 • Configuration • 자신이 사용할 하위 컴포넌트들을 선언하고, 그들간의 연결을 정의한 파일 • <컴포넌트 이름>.nc 또는 <컴포넌트 이름>C.nc • Module • 자신의 구현내용을 기술하고 있는 파일 • <컴포넌트 이름>P.nc 또는 <컴포넌트 이름>M.nc
Component-configuration(1) • 예) LED를 제어하는 Leds 컴포넌트의 configuration configuration LedsC { provides { interface Leds; } } implementation { components LedsP, PlatformLedsC; Leds =LedsP; … LedsP.Led0 → PlatformLedsC.Led0; LedsP.Led1 → PlatformLedsC.Led1; LedsP.Led2 → PlatformLedsC.Led2; } 모듈 파일 실제 하드웨어적 코드 Wiring
Component-configuration(2) • LedsP.Led0 -> PlatformLedsC.Led0; • LedsP에서 사용하는 Led0 인터페이스가 PlatformLedsC의 Led0 인터페이스와 Wiring • LedsP에서 프로그래밍을 할 때 PlatformLedsC에서 제공하는 Led0 인터페이스를 호출해서 사용하겠다는 의미 • LedsP는 Led0, Led1, Led2 인터페이스 함수를 통해 PlatformLedsC에 명령을 내리고 원하는 LED 제어 • Wiring 종류: ->, <-, = • d
Component-module(1) • Module 파일 • Define how the component work • Module의 기술 방법은 다음과 같다. (두 방법 모두 같음) • module identifier { • provides { • interface a; • interface b; • } • uses { • interface x; • interface y; • } • } implementation { • ... • ... • } • module identifier { • provides interface a; • provides interface b; • uses interface x; • uses interface y; • } implementation { • ... • ... • }
C1 C2 C3 Component-module(2) • provides & uses module C1 { uses interface triangle_1; } implementation { ... } module C2 { provides interface triangle_1; uses { interface triangle_2; interface rectangle; } } implementation { ... } module C3 { provides interface triangle_2; provides interface rectangle; } implementation { ... }
1. Task를 이용한 LED 제어 LED component를 사용하여 LED 제어
Download 프로그램 설치(1) • USB-ISP • Cygwin의 TinyOS 를 통해 원하는 USN 애플리케이션을 컴파일 후 컴파일 된 결과를 실제 센서 노드에 포팅(다운로드)하기 위한 보드 • 두개의 스위치 존재(ISP/UART) • ISP(In System Programming) • 프로그램(다운로드) 기능 • UART • 시리얼통신 기능
Download 프로그램 설치(2) • 다운로드 (USB_ISP.zip) 후 CMD2.00.00.zip을 압축 품 • USB-ISP 보드와 ZigbeX를 결합한 후 PC의 USB 포트와 연결하여 새 하드웨어 검색창이 뜨면 CMD2.00.00.zip 파일이 풀린 폴더를 선택(2번 설치됨)
Blink 예제 실습(1) $ cd /opt/tinyos-2.x/contrib/zigbex/Blink $ make zigbex
Blink 예제 실습(2) • USB-ISP와 ZigbeX노드를 결합 • USB-ISP mode는 ISP로 설정 • AVR Studio에서 Tools → Program AVR → Auto Connect 메뉴를 선택 • … 버튼을 눌러 Blink\build\zigbex\main.hex선택 후 Program 버튼을 눌러 프로그램함 • 프로그램 직후 led가 잠깐동안 깜박거리는 것을볼 수 있음
Blink.nc configuration Blink { } implementation { components MainC, BlinkM, LedsC, BusyWaitMicroC; BlinkM.Boot -> MainC; BlinkM.Leds -> LedsC; BlinkM.BusyWait ->BusyWaitMicroC; } Blink.nc MainC (configuration) BusyWaitMicroC (module) Boot BusyWait implementation BusyWait(); BlinkM (module) LedsC (configuration) Boot Leds implementation Boot.booted(); led_task(); implementation Leds.init(); Leds.redOn(); … Leds BusyWait
configuration MainC { provides interface Boot; uses interface Init as SoftwareInit; } implementation { components PlatformC, RealMainP, TinySchedulerC; RealMainP.Scheduler -> TinySchedulerC; RealMainP.PlatformInit -> PlatformC; SoftwareInit = RealMainP.SoftwareInit; Boot = RealMainP; } MainC.nc MainC.nc MainC (configuration) TinySchedulerC (configuration) Boot Scheduler implementation Scheduler.init(); Scheduler.runNextTask(); Scheduler.taskLoop(); SoftwareInit RealMainP (module) Boot implementation main(); boot.booted(); PlatformC (configuration) SoftwareInit Scheduler PlatformInit implementation PlatformInit.init() PlatformInit
RealMainP.nc module RealMainP { provides interface Boot; uses interface Scheduler; uses interface Init as PlatformInit; uses interface Init as SoftwareInit; } implementation { int main() __attribute__ ((C, spontaneous)) { atomic { call Scheduler.init(); call PlatformInit.init(); //각종 hardware 초기화 while (call Scheduler.runNextTask()); call SoftwareInit.init(); //각 모듈에서 사용하는 변수 초기화 while (call Scheduler.runNextTask()); } __nesc_enable_interrupt(); //글로벌 인터렙트 가능하도록 설정 signal Boot.booted(); //최상위 모듈에서 booted() 이벤트 발생하도록 함 call Scheduler.taskLoop(); //task를 수행 (task 없으면 sleep) return -1; } default command error_t PlatformInit.init() { return SUCCESS; } default command error_t SoftwareInit.init() { return SUCCESS; } default event void Boot.booted() { } }
async and atomic • Commands and Events that are executed as part of a Hardware Event handler must be declared with the async keyward • Indicates that this code may execute asynchronously to Tasks and other processes. • Races are avoided by • accessing shared data exclusively within Tasks • Because Tasks can’t interrupt each other • Use atomic statement to access shared variables
기본 지식 • LedsC component • 경로: \opt\tinyos-2.x\tos\system\LedsC.nc • Leds interface 사용
Blink 예제의 구성 configuration Blink { } implementation { components MainC, BlinkM, LedsC, BusyWaitMicroC; BlinkM.Boot -> MainC; BlinkM.Leds ->LedsC; BlinkM.BusyWait ->BusyWaitMicroC; } us(10-6) 단위의 지연시간을 줌 //booted 이벤트가 발생하면 프로그램 시작 //interface Leds와 하부 component의 Leds를 연결
module BlinkM { uses { interface Boot; interface Leds; interface BusyWait<TMicro, uint16_t>; } } implementation { task void led_task(); event void Boot.booted() { post led_task(); } task void led_task() { int i; for(i = 0; i < 10; i++) { call Leds.led2On(); call BusyWait.wait(30000); call Leds.led1Toggle(); call Leds.led2Off(); } } } //시간단위를 us (TMicro), 시간 변수 형식은 uint16_t로 함 //task로 실행하고 싶은 함수는 task 키워드를 붙이고파라미터가 없는 형식의 함수를 정의해야 함 //MainC component에 의해 호출됨 // task 함수를 호출하기 위해 post 키워드 사용 //30ms 지연시간 가짐
Blink 예제 실습(document 생성) $ cd /opt/tinyos-2.x/contrib/zigbex/Blink $ make docs zigbex