Download
1 / 28
280 likes | 486 Views
Toward Real-Time Pedestrian Detection Based on a Deformable Template Model. Marco Pedersoli , Jordi Gonzàlez , Xu Hu, and Xavier Roca IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 15, NO. 1, FEBRUARY 2014 355. Outline. Introduction Related work Methods System Overview

E N D
Toward Real-Time Pedestrian DetectionBased on a Deformable Template Model Marco Pedersoli, Jordi Gonzàlez, Xu Hu, and Xavier Roca IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 15, NO. 1, FEBRUARY 2014 355
Outline • Introduction • Related work • Methods • System Overview • CtF Search(Course to Fine) • Ctf Search With Deformations • Small Pedestrians • Experiment Result • Conclusion
Introduction • In this paper, we deal with pedestrian detection using a single camera mounted on the vehicle. • Pedestrian is hard to detect because… • Pedestrians have a much broader appearance variability than other objects. • Pedestrian detection is much more error critical.
Introduction • High accuracy techniques need plenty of time. • Some speedups can be achieved by restricting detection.
Introduction • We use a multiresolution representation and the coarse-to-fine (CtF)strategy to speed up the search. • Add a binary variable to detect small pedestrian.
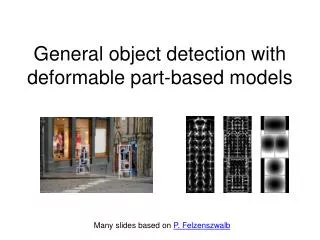
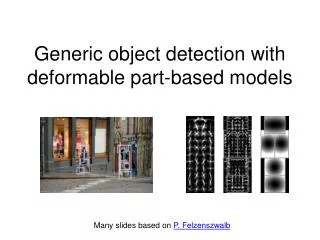
Related work • In more recent years, object detection has shown great improvements. • It is possible to detect pedestrians using single images. • In the template matching(TM) model, an object is represented by a learned template. • Recent examples of detectors based on this technique can be found in [5] and [20]–[22].
Related work [5] P. Felzenszwalb, R. Girshick, D. McAllester, and D. Ramanan, “Object detection with discriminatively trained part based models,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 32, no. 9, pp. 1627–1645, Sep. 2010. [20] N. Dalal and B. Triggs, “Histograms of oriented gradients for human detection,” in Proc. IEEE CVPR, 2005, pp. 886–893. [21] A. Vedaldi and A. Zisserman, “Structured output regression for detection with partial occlusion,” in Proc. NIPS, 2009, pp. 1–9. [22] L. Zhu, Y. Chen, A. Yuille, and W. Freeman, “Latent hierarchical structural learning for object detection,” in Proc. IEEE CVPR, 2010, pp. 1062–1069.
Related work • In [29], a cascade of parts to speed up deformable object detection is proposed. [29] P. F. Felzenszwalb, R. Girshick, and D. McAllester, “Cascade object detection with deformable part models,” in Proc. IEEE CVPR, 2010, pp. 2241–2248.
Related work • In [30], the authors propose to use GPU computation and ground-plane constraints to also obtain a real-time system for pedestrian detection. [30] P. Sudowe and B. Leibe, “Efficient use of geometric constraints for sliding-window object detection in video,” in Proc. ICVS, 2011, pp. 11–20.
Proposed methods - System Overview • Given an image, we precomputethe HOG featuresof the image at different resolutions, obtaining a pyramid of HOGs. 2. The pyramid is scanned at all resolutions in a CtF way, finding the locations that are the most similar to the template. 3. These locations are further processed by applying nonmaximum suppression (NMS) to the overlapping ones.
Course to Fine(CtF) Search • The standard procedure to find an object in the image consists of evaluating the similarity between the object model and the image features at every location and scale in the image. M: Object Model , H: HOG feature x = (x, y, s), where x and y are the coordinates of the window and s is its scale
Course to Fine(CtF) Search • Thecomplete scan over positions and scales is very expensive. • CtFsearch can save computation but still obtain results very similar to the complete search.
Course to Fine(CtF) Search • The key idea is to decompose the search over multiple resolutions, i.e., from coarse and then fine.
Course to Fine(CtF) Search • The score of the multiple-resolution detector is computed as sum over resolutions r of the object model Mrwith the corresponding features H.
CtF Search With Deformations • Object deformations may be produced by viewpoint changes or articulated movements such as limb movements. • Adding moving parts allows the detector to better adapt to local object deformations.
CtF Search With Deformations • In the object model, each resolution level is further divided into parts.
CtF Search With Deformations dx and dythat represent the displacement of a part p with respect to its father.
Small Pedestrians • Detecting far pedestrian gives enough time for a proper action to avoid collision. • Pedestrians far from the vehicle correspond to low-resolution pedestrians. • When the number of pixels representing an object is low, the ability to recognize the object is highly reduced.
Small Pedestrians • In CtF search a small instance object does not have fine-resolution features, but it still has the coarse representation. • As the resolution goes high , the HOG feature may disappear, and the missing high resolution features are set to zero. • In this way detections of small objects would have a score that is lower.
Small Pedestrians • To overcome this, the score is computed as hris a binary variable. • When the corresponding HOG features H(xr,p) are missing and therefore set to 0. • That makes scores of detections generated without high-resolution features.
Experiment Result • We evaluate our method on the Computer Vision Center (CVC)-02 data set, which is a data set specific for pedestrian detection in the context of driving assistance.
Experiment Result • CtF configuration with deformations and “resolution” feature activated. (False Positive Per Image)
Experiment Result- Rigid Versus Deformable Models Average precision ↑ but needs more time
Experiment Result - CtF Versus Complete Search Compared with complete search, the scan time ↓ and the average precision is almost the same.
Conclusion • This method is based on the combination of recent state-of-the arttechniques for fast and accurate object detection. • Three useful techniques mentioned make this method perform well.