Download
1 / 1
20 likes | 340 Views
라그랑지 방정식을 이용한 4 자유도 병렬로봇 H4 의 역동역학 해석. 홍길동 1 , 이휘재 1 , 장동건 1 , 유재석 1 , 강호동 2 , 이혁재 2 , 박명수 3 1 한국대학교 기계공학과 , 2 한국대학교 전자공학과 , 3 한국대학교 시스템공학과. 고속 병렬로봇용 제어기설계를 위해 상세 동역학 모델의 사용이 요구됨 종래의 H4 의 경우 rod 의 관성을 무시한 간이 동역학 모델을 사용 본 논문에서는 라그랑지 방정식을 이용하여 H4 의 역동역학 해석을 수행

E N D
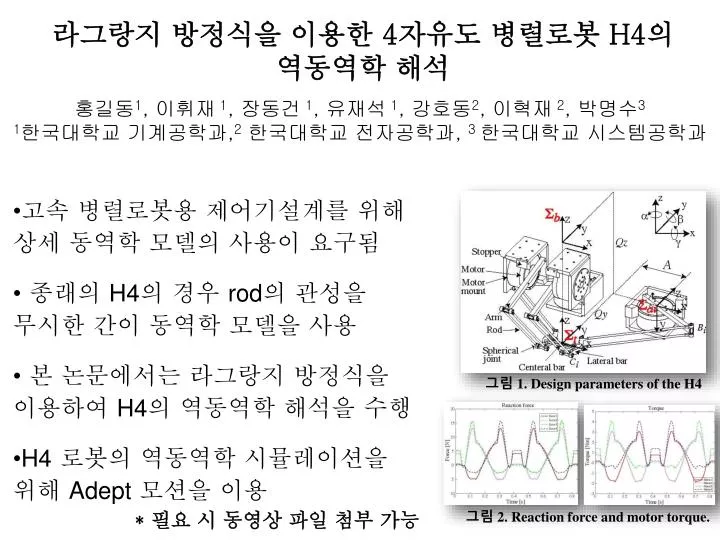
라그랑지 방정식을 이용한 4자유도 병렬로봇 H4의 역동역학 해석 홍길동1, 이휘재 1, 장동건 1, 유재석 1, 강호동2, 이혁재 2, 박명수3 1한국대학교 기계공학과,2 한국대학교 전자공학과,3 한국대학교 시스템공학과 • 고속 병렬로봇용 제어기설계를 위해 상세 동역학 모델의 사용이 요구됨 • 종래의H4의 경우 rod의 관성을 무시한 간이 동역학 모델을 사용 • 본 논문에서는 라그랑지 방정식을 이용하여H4의 역동역학 해석을 수행 • H4로봇의 역동역학 시뮬레이션을 위해 Adept모션을 이용 그림 1. Design parameters of the H4 * 필요 시 동영상 파일 첨부 가능 그림 2. Reaction force and motor torque.
