Download
1 / 19
210 likes | 747 Views
Model-Based Control. PID controller tuningRestrict controller to PID form Seek best" tuning parametersCan be perform with FOPTD model if availableModel-based controller designController is not restricted to PID formRequires a process model that is used to determine the controller form as well

E N D
1. Model-Based Controller Design Introduction
Direct synthesis method
Internal model control (IMC)
IMC derived PID tuning rules
Simulink example
2. Model-Based Control PID controller tuning
Restrict controller to PID form
Seek �best� tuning parameters
Can be perform with FOPTD model if available
Model-based controller design
Controller is not restricted to PID form
Requires a process model that is used to determine the controller form as well as the tuning parameters
Not restricted to FOPTD models
Makes full use of available model
Generates PID controllers for some model types
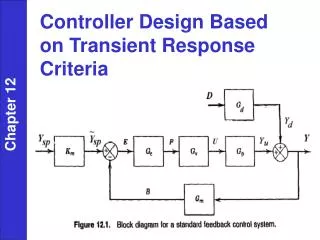
3. Direct Synthesis Method Closed-loop transfer function for setpoint changes
Simplification of CLTF
4. Control Objective Rearrange CLTF
Desired setpoint response
Gd is the desired CLTF
The controller Gc depends explicitly on the inverse of the process model G
The equation for Gc is known as the control law
5. Desired Closed-Loop Transfer Function The desired CLTF Gd is specified such that:
The resulting Gc has a single tuning parameter with an easily understood effect on closed-loop stability and performance
Gc is implementable � does not require prediction and has the appropriate properness
Properness
If n >= m, the controller is proper ? no derivative control
If n = m-1, the controller is improper ? derivative control
If n = m-2, the controller is improper ? requires second derivative of measured output (not implementable)
Seek controllers that are proper or improper with n = m-1
6. Selecting the Desired CLTF Common choice
tc > 0 is the desired closed-loop time constant
Gd is stable for all tc > 0
Gd has a steady-state gain of unity ensuring offset-free performance due to integral action in Gc
Closed-loop speed of response is determined by tc; typical choice is tc = 0.5t
Other choices of Gd may be required to ensure that Gc is implementable
7. Simple Examples First-order system
This is a PI controller!
Second-order system
This is a PID controller!
8. Systems with Time Delays Model representation:
Desired CLTF
FOPTD model
9. Non-Minimum Phase Systems Process Model
Zeros: N(s) = 0
Systems with right-half plane zeros can exhibit inverse response
Such systems are said to be non-minimum phase
Direct synthesis controller
Zeros of model become poles of controller
Controller is unstable if model is non-minimum phase
10. Internal Model Control Applicable to both minimum-phase and non-minimum phase systems
Do not invert non-invertible elements: time delays and right-half plane zeros
IMC approach
Factor model into invertible and non-invertible parts
Design IMC controller using the IMC control structure
Convert IMC controller into standard feedback controller
Implement standard feedback controller as usual
11. IMC Structure
12. IMC Design Factor the process model
contains any time delays and right-half plane zeros, has unity gain and is an all-pass element
Construct the IMC controller
f is the IMC filter, tc is the desired closed-loop time constant and r is chosen to G*c proper
Resulting closed-loop relation
13. First-Order System This is a PI controller
Same result as direct synthesis method
Two methods always yield same result when G+ = 1
14. Non-Minimum Phase Examples Right-half plane zero
Time delay
15. PID Tuning Rules
16. Example: IMC Design
17. Example: Simulink Implementation
18. Example: Setpoint Tracking
19. Example: Disturbance Rejection