Download

1 / 85
850 likes | 866 Views
Explore cutting-edge research on computer vision applications and techniques at Florida State University Vision Group led by Xiuwen Liu. Learn about the group's projects and accomplishments in this exciting field.

E N D
Research Activities at Florida State Vision Group Xiuwen Liu Florida State Vision Group Department of Computer Science Florida State University http://fsvision.cs.fsu.edu Group members: Lei Cheng, Donghu Sun, Yunxun Wang, Chris Waring, Qiang Zhang,
Outline • Introduction • What is my research all about? • Some applications of computer vision • How useful are the computer vision techniques? • Samples of my research work • What have I done? • Some of the research projects in my group • What is going on within my group? • Contact information • How to contact me?
Introduction • An image patch represented by hexadecimals
Introduction - continued • Fundamental problem in computer vision • Given a matrix of numbers representing an image, or a sequence of images, how to generate a perceptually meaningful description of the matrix? • An image can be a color image, gray level image, or other format such as remote sensing images • A two-dimensional matrix represents a signal image • A three-dimensional matrix represents a sequence of images • A video sequence is a 3-D matrix • A movie is also a 3-D matrix
Introduction - continued • Why do we want to work on this problem? • It is very interesting theoretically • It involves many disciplines to develop a computational model for the problem • It has many practical applications • Internet applications • Movie-making applications • Military applications
Computer Vision Applications • Eye Vision • Developed by Carnegie Mellon • It captures a dynamic event using multiple cameras and it can then synthesize new views • http://www.ri.cmu.edu/events/sb35/tksuperbowl.html
Computer Vision Applications - continued • No hands across America • sponsored by Delco Electronics, AssistWare Technology, and Carnegie Mellon University • Navlab 5 drove from Pittsburgh, PA to San Diego, CA, using the RALPHcomputer program. • The trip was 2849 miles of which 2797 miles were driven automatically with no hands • Which is 98.2%
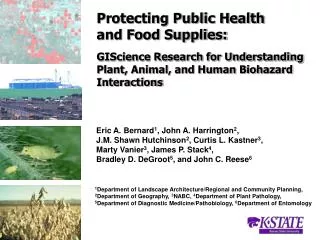
Computer Vision Applications– continued • Military applications • Automated target recognition
Computer Vision Applications– continued • Extracted hydrographic regions
Computer Vision Applications– continued • Medical image analysis • Characterize different types of tissues in medical images for automated medical image analysis
Computer Vision Applications– continued • Biometrics • From faces, fingerprints, iris patterns ..... • It has many applications such as ATM withdrawal, credit card managements .....
Computer Vision Applications – cont. • Iris pattern recognition http://www.cl.cam.ac.uk/users/jgd1000/iris_recognition.html • Companies in several countries are now using these algorithms in a variety of products. Information about them can be found on the following websites: • Iridian Technologies, USA • IrisAccess LG Corp, South Korea • IrisPass OKI Electric Industries, Japan • EyeTicket Eyeticket Corporation, USA (ticketless air travel) • NCR CashPoint Machines NCR Corp, UK • Diebold ATMs Diebold Inc., USA • British Telecommunications, UK • The Nationwide Building Society, UK
Computer Vision Applications– continued • Content-based image retrieval has been an active research area to meet the needs of searching images on the web in a meaningful way • Color histogram has been widely used
Content-Based Image Retrieval – cont. 1st 2nd 3rd 4th 5th Query Image
My Research Work in the Last Few Years • Image modeling and synthesis • Low dimensional representations of images for recognition • Analytical probabilistic models of images
Is there a common feature that characterizes all these images perceptually? Image Modeling
Spectral Representation – continued • Given a set of filters, a spectral representation of an image consists of the marginal distributions of the filtered images. Input image Its spectral representation
Partitioning Filters in Frequency and Spatial Domain A filter as a surface Deriving Spectral Representation • Partition of the frequency domain
(a) (b) (c) Deriving Spectral Representation - continued • Learning filters from training images as independent filters
Image Modeling - continued • Image synthesis • Given some feature statistics, how to generate samples from the Julesz ensemble • The main technical difficulty is the dimension of the image space • If the image size is 256x256 and each pixel can have 8 values, there are 865536 different images • Markov chain Monte-Carlo algorithms
Image Synthesis Through Sampling • Given observed feature statistics {H(a)obs}, we associate an energy with any image I as • Then the corresponding Gibbs distribution is • The q(I) can be sampled using a Gibbs sampler or other Markov chain Monte-Carlo algorithms
Texture Synthesis Through Sampling - continued Image Synthesis Algorithm • Compute {Hobs} from an observed texture image • Initialize Isyn as any image, and T as T0 • Repeat Randomly pick a pixel v in Isyn Calculate the conditional probability q(Isyn(v)| Isyn(-v)) Choose new Isyn(v) under q(Isyn(v)| Isyn(-v)) Reduce T gradually • Until E(I) < e
A Texture Synthesis Example Observed image Initial synthesized image
Temperature Image patch Energy Conditional probability A Texture Synthesis Example • Energy and conditional probability of the marked pixel
Average spectral histogram error A Texture Synthesis Example - continued • A white noise image was transformed to a perceptually similar texture by matching the spectral histogram
A Texture Synthesis Example - continued • Synthesized images from different initial conditions
Observed image Synthesized image Texture Synthesis Examples - continued • A random texture image
Texture Synthesis Examples - continued • An image with periodic structures Observed image Synthesized image
Texture Synthesis Examples - continued • A mud image with some animal foot prints Mud image Synthesized image
Texture Synthesis Examples - continued • A random texture image with elements Observed image Synthesized image
Synthesized image Original cheetah skin patch Texture Synthesis Examples - continued • A cheetah skin image
Texture Synthesis Examples - continued • An image consisting of circles Observed image Synthesized image
Texture Synthesis Examples - continued • An image consisting of crosses Observed image Synthesized image
Observed image Synthesized image Texture Synthesis Examples - continued • A pattern with long-range structures
Comparison with Texture Synthesis Method • Example from Heeger and Bergen’s algorithm (1995)* Observed image Heeger and Bergen’s Our result * Implemented by T. F. El-Maraghi, available at http://www.cs.toronto.edu/~tem/2522/texture.html
Comparison with Texture Synthesis Method - continued • Another example from Heeger and Bergen’s algorithm Cross image Heeger and Bergen’s Our result
Low Dimensional Representations of Images for Recognition • In recent years, as a means of dimension reduction, principal component analysis, fisher discriminant analysis, and independent component analysis are widely used in appearance-based recognition • Each object type is represented by a representative set of training images using a linear subspace • A classifier is learned based on the training set • A new image is classified based on its linear representation
Linear Representation • Under the linear representation, an observed image window I is assumed to be generated by a linear combination of K hidden factors : • Under the linear assumption, recovering the representation of given an input is through pseudo inverse, given by:
Linear Subspaces of Images – continued • In the linear representation framework, each pixel is associated with a random variable • A critical assumption is that each pixel needs to correspond to a meaningful event for the subsequent analysis to be meaningful • This assumption, however, is often not valid due to translation, scaling, and other deformations
Spectral Representation for Recognition • To make the assumption valid under some deformations, we propose a spectral representation • We represent each image by the underlying probability under the linear assumption, not the vector given by the projection onto a basis • This is done by breaking the images into roughly independent channels, representing each by its marginal • We then use linear subspaces in the spectral representation space, resulting IPCA, IICA, and IFDA
Comparison of Spaces Through Synthesis • Synthesis using eigen face representations Typical sampleswith identical eigen representations Original Reconstructed