Download
1 / 24
240 likes | 289 Views
Learn about optimal gasoline blending using Matlab, control system design, and linear modeling for efficient operation.

E N D
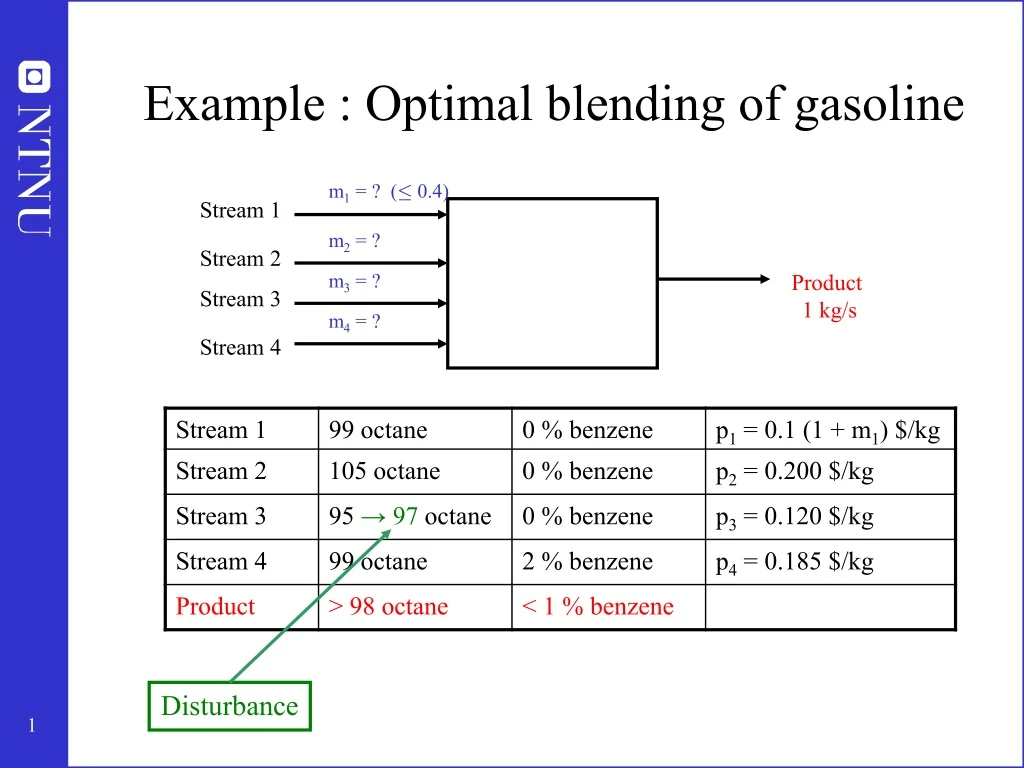
Stream 1 Stream 2 Product 1 kg/s Stream 3 Stream 4 Example : Optimal blending of gasoline m1 = ? (· 0.4) m2 = ? m3 = ? m4 = ? Disturbance
Optimization problem • Degrees of freedom uo = (m1 m2 m3 m4 )T • Optimization problem: min J = i pi mi = 0.1(1 + m1) m1 + 0.2 m2 + 0.12 m3 + 0.185 m4 subject to m1 + m2 + m3 + m4 = 1 m1¸ 0; m2¸ 0; m3¸ 0; m4¸ 0 m1· 0.4 99 m1 + 105 m2 + 95 m3 + 99 m4¸ 98 (octane constraint) 2 m4· 1 (benzene constraint)
Exercise 1: Optimal operation The Matlab function quadprog will be used to find optimal operation • Calculate the optimal operating point for the nominal values (octane in stream 3 equal 95) • Calculate the optimal operating point with disturbance (octane in stream 3 equal 97) • Report value of objective function and flowrates for both cases • How many degrees of freedom, active constraints and unconstrained degrees of freedom are there?
Optimal solution • Nominal optimal solution (d* = 95): u0,opt = (0.26 0.196 0.544 0)T) Jopt= 0.13724 $ • Optimal solution with d=octane stream 3=97: u0,opt = (0.20 0.075 0.725 0)T) Jopt= 0.1260 $ m1 + m2 + m3 + m4 = 1 m1¸ 0; m2¸ 0; m3¸ 0; m4¸ 0 m1· 0.4 99 m1 + 105 m2 +95 m3 + 99 m4¸ 98 (octane constraint) 2 m4· 1 (benzene constraint) • 3 active constraints) 1 unconstrained degree of freedom
Exercise 1 cont.: Optimal operation • There is one unconstrained degree of freedom, which can be used to optimize operation • What is the loss of using this unconstrained DOF to maintain the following constant at nominal set point: • m1 • m2 • m3
Implementation of optimal solution • Available ”measurements”: y = (m1 m2 m3 m4)T • Control active constraints: • Keep m4 = 0 • Adjust one (or more) flow such that m1+m2+m3+m4 = 1 • Adjust one (or more) flow such that product octane = 98 • Remaining unconstrained degree of freedom • c=m1 is constant at 0.26 ) Loss = 0.00036 $ • c=m2 is constant at 0.196 ) Infeasible (cannot satisfy octane = 98) • c=m3 is constant at 0.544 ) Loss = 0.00582 $ • Easily implemented in control system
Exercise 2: Maximum gain rule • Assume that there is an implementation error of 0.01 kg/s in flowrates • Use the singular value rule to find the approximate losses for the following cases: • m1 constant • m2 constant • m3 constant • Optimal combination of m1 and m2 constant (use Null space method for finding optimal combination)
Maximum gain rule: Details • c = m2 • Need “gain” and “span” • Can use any of m1, m2 and m3 as remaining d.o.f.(use m1) m1 + m2 + m3 = 1 99m1 + 105 m2 + 95 m3 = 98 ) 99m1 + 105 m2 + 95 (1 - m1 - m2) = 98 ) 4m1 + 10m2 = 3 ) Gain = - 0.4 Span is simply the difference of optimal values for d = 95 and d = 97
Unconstrained degrees of freedom:C. Optimal measurement combination (Alstad, 2002) Basis: Want optimal value of c independent of disturbances ) • copt = 0 ¢ d • Find optimal solution as a function of d: uopt(d), yopt(d) • Linearize this relationship: yopt= F d • F – sensitivity matrix • Want: • To achieve this for all values of d: • Always possible if • Optimal when we disregard implementation error (n)
Optimal combination c = h1 m1 + h2 m2 Requirement: HF = 0 From optimization: mopt = F d sensitivity matrix F = (-0.03 -0.06)T ) – 0.03 h1 – 0.06 h2 = 0 This has infinite number of solutions Fix h1 = 1 to get h2 = 0.5 ) Loss = 0
m1 = cs + 0.5 m2 cs = 0.162 0.5 m2 OC Octanes = 98 m3 FC mtot.s = 1 kg/s Stream 1 Octane mtot Stream 2 Stream 3 Octane varies Stream 4 m4 = 0 kg/s Blending: Example of implementation of ”self-optimizing” constant setpoint policy • Selected ”self-optimizing” variable: c = m1 – 0.5 m2 • Changes in feed octane (stream 3) detected by octane controller (OC) • Implementation is optimal provided active constraints do not change • Price changes can be included as corrections on setpoint cs • Comment: Example is for illustration. Use MPC in practice (changing constraints)!
Dynamic simulations m1 m3 m2 m4 mtot
Details of dynamics • P-control of tank level: m = Kc M with Kc=0.001 • The tank has a variable mass M of 1000m (where m is the total flowrate) • Time constant in valves are 10s • Octane measurement has a delay of 60 s • Each flow may vary between 0 and two times nominal value • m4 is not used so inputs are [m1, m2, m3]' = Flowrates • Output: • y1 = Product flowrate • y2 = Octane number in product • y3 = c (a selected measurement, or a combination of two measurements)
Exercise 3: Linear model • Derive the linear model for the different control policies: • m1 constant • m2 constant • m3 constant • m1 - 0.5 m2 constant
Linear Model • Recall m1 + m2 + m3 = m = y1 99m1 + 105 m2 + 95 m3 = X m = y2 y1 Linearize second equation 99m1 + 105 m2 + 95 m3 = y2*y1 +y2 y1* ) 99m1 + 105 m2 + 95 m3 = 98y1 +y2 ) = 98(m1 + m2 + m3)+y2 ) m1 + 7 m2 - 3 m3 = y2
Linear analysis • Linear model with controlled variable c = m1 - 0.5 m2 constant: G = 1/(1000s + 1)(10s + 1) [ 1 1 1; 1e-60s 7e-60s -3e-60s; 1 -0.5 0] • Steady state RGA: c = m1 c = m2 c = m3 c = m1 - 0.5m2
Flow controller: G(s) = 1/((1000s+1)*(10s+1)) k = 1 τ1 = 1000+10/2 = 1005 θ = 10/2 = 5 K = τ1/(2 θ k) = 100.5 τI = min(τ1, 8θ) = 40 Octane controller G(s) = k'*e-60s/((1000s+1)*(10s+1)) k = 7, 1, -3 depending on pairing τ1 = 1000+10/2 = 1005 θ = 60 + 10/2 = 65 K = τ1/(2 θ k) = 7.73/k τI = min(τ1 , 8 θ) = 520 K = 1.10 if m1 controls octane K = 7.73 if m2 controls octane K = -2.58 if m3 controls octane Controller tuning: SIMC tuning rules
Dynamic simulations • Disturbance • Octane of stream 3 steps from 95 to 94 at t=0 • Octane of stream 3 steps from 94 to 97 at t=3000 • Profit/kg = (product price - raw material price - TV)/amount of product • TV is a function of controller usage • Product price = 0.2 when octane > 97.9 0.15 when octane < 97.9 • Simulation time is 10 000 s
Selecting control structure • Loss calculations shows zero losses for linear combinations of two measurements (m1 - 0.5 m2 constant) • Singular value rule shows a small loss factor for linear combination of two measurements (m1 - 0.5 m2 constant) • Steady state RGA indicates interactions when using the linear combination m1 - 0.5 m2 constant. Are other combinations better? • Dynamic simulations shows that there is better to keep m3 constant than m1 - 0.5m2 constant, but is it possible to overcome this by re-tuning the controllers?
















