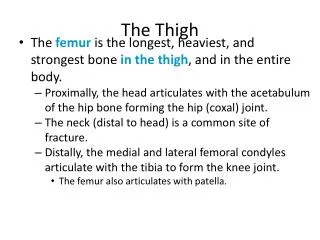
Download
1 / 4
40 likes | 214 Views
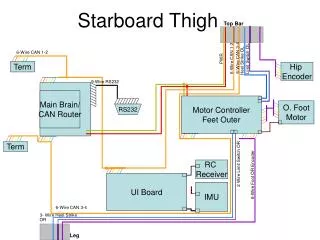
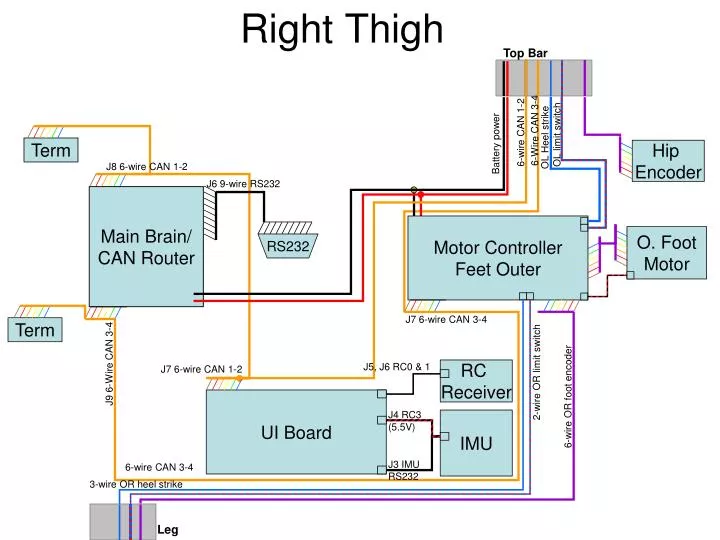
Motor Controller Feet Outer. O. Foot Motor. Term. RC Receiver. UI Board. Right Thigh. Top Bar. OL limit switch. OL Heel strike. 6-wire CAN 1-2. 6-Wire CAN 3-4. Battery power. Term. Hip Encoder. J8 6-wire CAN 1-2. J6 9-wire RS232. Main Brain/ CAN Router. RS232.

E N D
Motor Controller Feet Outer O. Foot Motor Term RC Receiver UI Board Right Thigh Top Bar OL limit switch OL Heel strike 6-wire CAN 1-2 6-Wire CAN 3-4 Battery power Term Hip Encoder J8 6-wire CAN 1-2 J6 9-wire RS232 Main Brain/ CAN Router RS232 J7 6-wire CAN 3-4 J9 6-Wire CAN 3-4 2-wire OR limit switch J5, J6 RC0 & 1 J7 6-wire CAN 1-2 6-wire OR foot encoder J4 RC3 (5.5V) IMU J3 IMU RS232 6-wire CAN 3-4 3-wire OR heel strike Leg
Limit switches Steering angle sensor Steering motor I. foot motor Center thigh Term J7 CAN 3-4 Motor controller steering inner Center battery Top bar data connector 2-wire motor power Top power J2 3-wire sensor cable BATT + GND SYS + (switch) CAN 3-4 J7 CAN 3-4 Motor controller feet inner J3 6-wire motor encoder i. feet 2-wire Motor Power J9 6-wire encoder i. feet J4 2-wire limit switch IR J4 2-wire limit switch IL J2 3-wire heel strike IR J2 3-wire heel strike IL Leg
Hip motor Left thigh Top Data PWR -+ 6-wire CAN 1-2 Limit Switch OL Heel Strike OL 6-wire Hip Encoder 6-wire CAN 3-4 out 6-wire CAN 3-4 in 6-wire Motor Encoder Hip 2-wire Motor Power Motor controller GPS Term Motor controller hip 6-wire Foot OL Encoder Leg
Top bar Center power BATT+ GND Robot chassis ground – one connection SYS+ Power switch Outer left limit switch Outer left limit switch Outer left heel strike Outer left heel strike 6-wire Hip Encoder 6-wire Hip Encoder 6-Wire CAN 3-4 6-Wire CAN 3-4 6-Wire CAN 1-2 6-Wire CAN 1-2 6-Wire CAN 3-4 6-Wire CAN 3-4 Right Thigh Center Thigh Left Thigh