Download
1 / 12
130 likes | 861 Views
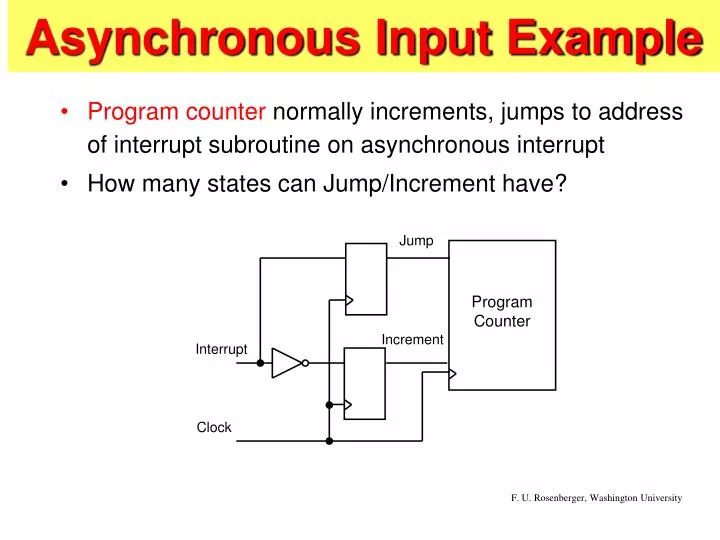
Asynchronous Input Example. Program counter normally increments, jumps to address of interrupt subroutine on asynchronous interrupt How many states can Jump/Increment have?. Jump. Program Counter. Increment. Interrupt. Clock. F. U. Rosenberger, Washington University.

E N D
Asynchronous Input Example • Program counter normally increments, jumps to address of interrupt subroutine on asynchronous interrupt • How many states can Jump/Increment have? Jump Program Counter Increment Interrupt Clock F. U. Rosenberger, Washington University
Asynchronous Input Example – Revised Jump Program Counter Increment Interrupt Clock • Did we solve the problem? Why not? F. U. Rosenberger, Washington University
Metastability • Metastable State – signal not 1 or 0 or • oscillating for a nondeterministic length of time • Can occur when insufficient energy is applied to cause a latch to switch to either a 1 or 0. • Examples: • Dual processor with shared memory • FIFO with asynchronous input and output • Processor interrupts • Yellow traffic light • Two people meet in hallway • Dog midway between two food dishes may starve Altera Application Note 42
Design Approach Where Metastability Present • Don’t look for solution, there is none (don’t believe everything you read). • Bottom line - Can’t guarantee correct operation with arbitrary clock and data phase • Do design such that worst case probability of error is acceptable • Do understand and be able to identify trouble spots in design F. U. Rosenberger, Washington University
Why Metastability is a “Special” Problem, Charles E. Molnar • Because it “breaks most of the conceptual and computatonal tools that we use from day to day (e.g., binary or two state circuits) • It defies careful and accurate measurements • It can produce failures that leave no discernable evidence • It can cause failures in systems whose software is “correct” and whose hardware passes all conventional tests • It involves magnitudes of time and voltage to be removed from our daily experience F. U. Rosenberger, Washington University
Metastability in D Flip-Flops For D Flip-Flop, caused by setup or hold-time violations tMET= time of metastability Altera Application Note 42
Analyzing Metastability • Mean Time Between Failure (MTBF) for a synchronization flip-flop can be estimated with the following formula • where • fCLOCK is the system clock frequency • fDATA is the data transfer frequency • tMET is the additional time allowed for the flip-flop to settle • C1and C2 are device specific parameters found by plotting the natural log of MTBF versus tMETand performing linear regression analysis on the data Altera Application Note 42
Mean Time Between Failure MTBF vs. TMET Altera Application Note 42 Time of metastability
Metastability Test Circuit Circuit that can be used to count metastable events Altera Application Note 42
Determining TMET for a given MTBF From test circuit we can find C2 Then we can solve for C1 With C1and C2 known, can find required tMET for given clock and data rates and required MTBF. Altera Application Note 42
Application Example Example Altera Flex 10K C1 = 1.01 x 10-13, C2 = 1.268 x 1010 For one year (~3x107 seconds) and a data frequency of 2MHz and a clock frequency of 10 MHz Small increases in tMET dramatically affect the MTBF. A tMET delay to 1.59 ns increases MTBF to 10 years. Altera Application Note 42
Synchronizer Circuits Example tMETis the clock period minus the setup time and wiring delays (and combinational logic delays if there is logic between the flip-flops). Metastable Output Synchronized Output Data Clock