Download
1 / 63
650 likes | 1.22k Views
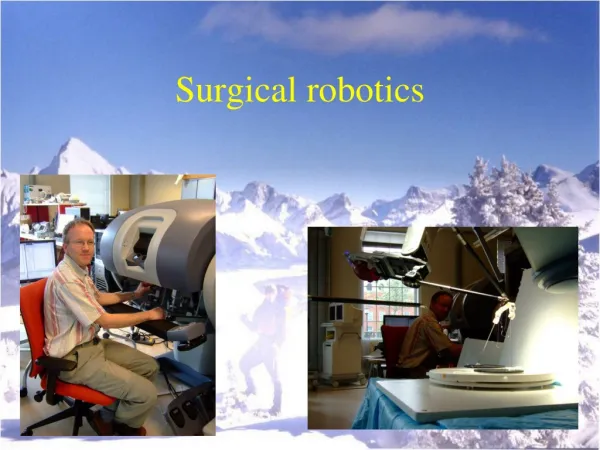
Advances in Telesurgery and Surgical Robotics. Dr S. Sanyal. World’s first telesurgery. September 2001 : Tele- chole Prof Jacques Marescaux , New York & European Institute of Telesurgery, Strasbourg Round distance =14,000 km RTT = 200 msec ; video and hi-speed fibre-optic link

E N D
Advances in Telesurgery and Surgical Robotics Dr S. Sanyal
World’s first telesurgery • September 2001: Tele- chole • Prof Jacques Marescaux, New York & European Institute of Telesurgery, Strasbourg • Round distance=14,000 km • RTT = 200 msec ; video and hi-speed fibre-optic link • June 2001: Johns Hopkins University, Baltimore & Rome Policlinico Casilino University • http://news.bbc.co.uk/2/hi/science/nature/1552211.stm
The research pioneers • SRI @ Stanford U School of Medicine • HMSL @ MIT • IMRL @ UC Berkeley and UCSF
Traditional surgery Tri-dimensional Cognitive input Tactile feedback Stereoscopic vision with depth perception Time lag -ve Telesurgery Two-dimensional Cognitive feedback limited Tactile feedback –ve Binocular vision without depth perception Time lag +ve Background
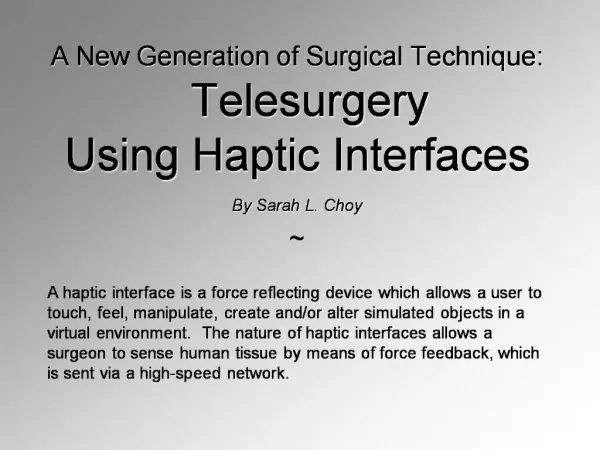
Definitions • Telepresence surgery: Computerized interface @ surgical workstation ↔ remote operative site; force feedback (haptic) • Cooperative telesurgery: tele-surgeon / local (remote) assistant cooperation http://www2.telemedtoday.com/articles/telesurgery.shtml http://web.mit.edu/hmsl/www/Telesurgery/
Definitions – cont’d • Telerobotics: Remote control with a robotic arm, in conjunction with a laparoscope http://www2.telemedtoday.com/articles/telesurgery.shtml
Definitions – cont’d • Telementoring: Experienced surgeon acts as tutor / instructor (preceptor) for remote surgeon via interactive video • Teleproctoring (proctor=supervisor of exams): Documentation of performance for privileging purposes http://www2.telemedtoday.com/articles/telesurgery.shtml
Technical aspects • Image transmission: T1 transmission (H-320 compression standard) • Fibre-optic cable • Microwave • Satellite • Lag time: should be < 330 ms • VOR disruption (3-D vertigo; Simulator sickness within 20 minutes) • Movement scaling: 1cm → 1mm • Haptic: Force feedback
Haptic • Force reflection / feedback; Graduated tactile input – resistance at remote site is transmitted to near site by servo motors @ both sites
Robotic vs. human arm • DOF: Number of ways an arm can move • Human arm: 7-DOF • Human hand: >20-DOF • Robotic arm: Like human hand, arm and moveable elbow - but with a fused wrist • Robotic arm: 4-6 DOF
Telesurg dynamics @ MIT • Surgeon’s fingers placed in rings of instruments • Rings are connected to motors, gears and belts • Precisely translate surgeon’s hand / finger motions into digital signals • Transmitted through computer- telecomm link • To robotic arms @ remote surgical station • Visual input: 2 remote CCD cameras (15 fps each → 3-D effect) → Surgeon’s monitor → Mirror → Optical 3-D glasses (stereoscopic vision) http://web.mit.edu/hmsl/www/Telesurgery
Dynamics of robotics @ UC • Surgeon – remote location – TV console – set of handheld controls ~ videogame joysticks • Joystick: Pencil-sized; 1 for each hand • Computer: Program translates surgeon’s movements • End-effectors: Robotic instruments enter body to perform actual operation • Early models: 3-fingered hand • Present: Hydraulic-powered, single-digit, 3-4” x ½”, 4-jointed (rotate, swivel, to-fro), 2-pronged end grasper • Anthropomorphic movements http://robotics.eecs.berkeley.edu/medical/
Details of robots • ‘Robo-doc’: 2 robots working in concert • Holding robots • Companion robots / milli-robots / robotic manipulators
Holding robots • Pair of large robotic arms • Hydraulic-actuated • Sits on moveable platform • Driven remotely by surgeon’s joysticks • Performs like a surgeon’s shoulder, allowing positioning of its hydraulic arms
Holding robots – cont’d • Holds 2nd robot, wheels instruments into position by patient’s side • Guides them through dexterity-requiring surgical procedures (suturing, dissection) • Holds instruments steady while surgeon sutures and ties knots
Companion / Milli-robots / Robotic manipulators • Sterile, disposable, steel, mm-scale, fingertip-sized • Slender, jointed, finger-liketools • Connected by wires and tubes to larger robot • Pair of gripping forceps at one end to carry surgical tools • Contains miniscule video-camera
Companion robot – cont’d • Inserted into body for actual surgical tasks (cutting, suturing) – 10-20 mm incisions • Inserts cameras • Provide tactile feedback though force-deflecting joysticks • Provides 7 DOF
Mini robot controls @ UCB Roll-pitch-roll ‘wrist’, gripper and multi-fingered manipulators
Robotic endo-manipulator Endo-platform with biopsy forceps
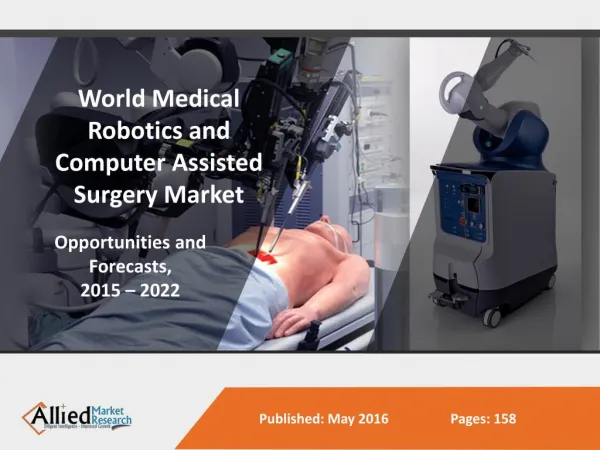
Robotic Cardiac Surgery @ EHIRC • da Vinci Tele-manipulation system • Intuitive Surgical Inc., Mountain View, CA, USA • Computer enhanced system • Surgeon’s console • Cart-mounted robotic manipulators http://www.ehirc.com/individuals/services/treatment/robotic_surgery.html#
Display system: 3-D pictures of chest cavity Surgeon sits at console and gets 3-D view of chest interior Hand motions are captured, transformed and transmitted to tiny robotic manipulators Surgeon’s console @ EHIRC
Robotic manipulators @ EHIRC • Robot is not autonomous; surgeon-controlled • Hold tiny instruments, which go inside the patient's chest. • Surgeon's hand movements transmitted to these instruments • CABG, mitral valve repair, ASD closure
Totally endoscopic CABG • Advantages • Only 3-incisions, each 1 cm on the side and lower chest • Less pain • Faster healing and recovery • Short hospital stay
Technical innovations • Teletactation (Tactile feedback) • CyberGlove® with CyberTouch • Dextrous master glove • Spatial cognition – Hand assist • Surgical simulations • Dextrous mini-robots
Teletactation –Tactile feedback • Sensing tactile information through tactile sensors that transmit feel of tissue to surgeon’s finger