Download
1 / 14
140 likes | 264 Views
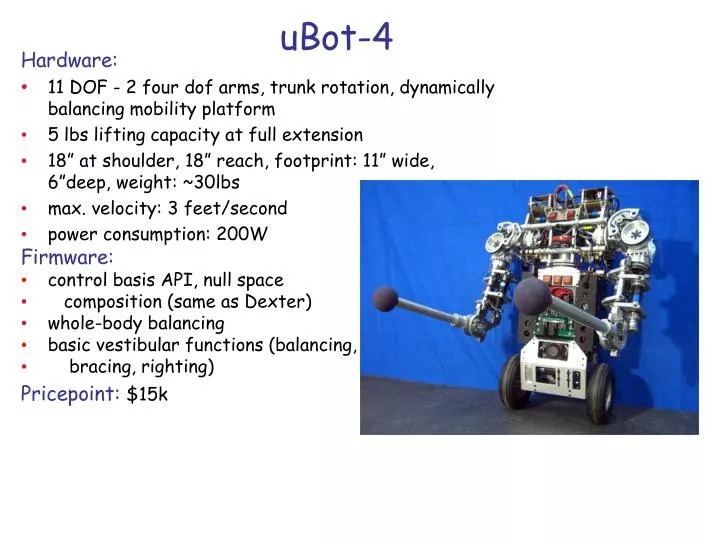
uBot-4. Hardware: 11 DOF - 2 four dof arms, trunk rotation, dynamically balancing mobility platform 5 lbs lifting capacity at full extension 18” at shoulder, 18” reach, footprint: 11” wide, 6”deep, weight: ~30lbs max. velocity: 3 feet/second power consumption: 200W Firmware:

E N D
uBot-4 Hardware: • 11 DOF - 2 four dof arms, trunk rotation, dynamically balancing mobility platform • 5 lbs lifting capacity at full extension • 18” at shoulder, 18” reach, footprint: 11” wide, 6”deep, weight: ~30lbs • max. velocity: 3 feet/second • power consumption: 200W Firmware: • control basis API, null space • composition (same as Dexter) • whole-body balancing • basic vestibular functions (balancing, • bracing, righting) Pricepoint:$15k
uBot-4 Mobile Manipulator Technology • supports momentum re-distribution and control (robot weight lifting) • load carrying strategies that do not violate stability constraints of the platform • basic vestibular functions (whole-body balancing, bracing, righting)
NASA Surface Handling - Habitat Construction …despite the added complexity, evolution repeatedly selects for solutions that exploit dynamics to achieve performance, power, and speed • supports momentum re-distribution and control (robot weight lifting) • load carrying strategies that do not violate stability constraints of the platform • basic vestibular functions (whole-body balancing, bracing, righting)