Download
1 / 9
140 likes | 476 Views
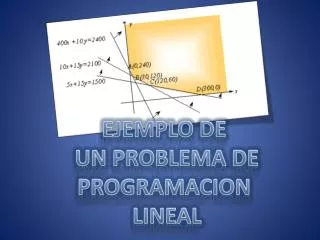
3- PROGRAMACION LINEAL PARAMETRICA. ORIGEN : En las aplicaciones prácticas, muchas veces se desconoce el valor exacto de los coeficientes que aparecen en un problema de programación lineal. DEFINICIONES Dado (P) Min c T x / Ax = b, x 0,

E N D
ORIGEN: En las aplicaciones prácticas, muchas veces se desconoce el valor exacto de los coeficientes que aparecen en un problema de programación lineal. DEFINICIONES • Dado (P) Min cTx / Ax = b, x 0, definimos el problema lineal paramétrico en los costos como: (Pc) Min (c+c*)Tx / Ax = b, x 0, y el problema lineal paramétrico en los términos independientes como: (Pb) Min cTx / Ax = b+ b*, x 0,
PARAMETRICO EN LOS COSTOS • Supongamos que el problema (Pc) se resolvió para un cierto valor de = 0. Sean: • B la base óptima y B-1=( ij) • XB el vector básico asociado a B y la solución dual • cB el vector de costos asociado a la base B y cB* los correspondientes c* asociados a B. • = cBTB-1 y *= cB*TB-1 • costos reducidos: c’+ c*’, donde c’=c- TA y c*’= c*- *TA • Nota: todos los vectores * pueden ser llevados en forma simultánea en el simplex
La base B, encontrada para =0, es una base óptima / c’+ c*’ 0 , o sea: / m M, siendo [m,M el intervalo característico o de optimalidad de B con: m= max (-cj’/ cj*’ , j / cj*’ >0) o m=- si cj*’ 0 j M= min (-cj’/ cj*’ , j / cj*’ <0) o M=+ si cj*’ 0 j • Si m>M elintervalo es vacío y B no puede ser una base óptima. • Si m=M hay un único valor de para el cual B es óptima. • Para [m,M la solución óptima es x= B-1b,valor óptimo del objetivo z+z* y las variables duales + *
Esquema del algoritmo: 1- Resolver (Pc) para = 0, sea B la base óptima final, i=0 2- Calcular el intervalo de optimalidad [mi,M i . 3- Si Mi finito: resolver (Pc) para >Mi, si no ir a 4: Sea s= el j que alcanza el valor mínimo en la expresión de Mi / Mi=-cs’/cs*’. Cuando >Mi, entrar xs a la base: si ais 0 i, entonces el problema es no acotado >Mi, si no, entrar xs a la base y calcular la nueva base B’, mi+1=M i, calcular el nuevo M i+1, i=i+1, actualizar , ir a 3. 4- i=0, 5- Si mi finito: resolver (Pc) para < mi, si no, fin. Identificar s/ mi=-cs’/cs*’. Entrar xs a la base: si ais 0 i, entonces el problema es no acotado <mi, si no entrar xs a la base y calcular la nueva base B’, Mi+1=m i, calcular el nuevo mi+i, i=i+1, actualizar , ir a 5.
NOTAS: • Los intervalos característicos de las bases óptimas no se superponen, salvo en los extremos de los intervalos. • Los intervalos donde la función objetivo z(x) es no acotada son intervalos de la forma: (-, *) o (*,+) • En el algoritmo, una vez que el deja el intervalo característico, la base óptima no se vuelve a repetir. Si se utilizan las técnicas de no degeneración, para un fijo, no hay ciclos. Como el número total de bases posibles es finito, el proceso siempre termina, con un número finito de intervalos. • En cada intervalo característico si bien se fija el para hacer el cálculo, el objetivo es una función lineal de . • El valor del objetivo al final y al principio de dos intervalos consecutivos son iguales. • El costo óptimo de un problema lineal paramétrico es una función de lineal a trazos y contínua.
PARAMETRICO EN LOS TERMINOS INDEPENDIENTES • Sea (Pb) Min cTx / Ax = b+ b*, x 0, • Supongamos que el problema (Pb) se resolvió para un cierto valor de = 0. Sean: • B la base óptima y B-1=( ij) • b’ el término independiente final / b’= B-1 b y b*’= B-1 b* • costo óptimo: z’+ z*’, donde z’= cBTB-1 b y z*’ = cBTB-1 b* • La base B, encontrada para =0 , es una base óptima / b’+ b*’ 0 , o sea: / m M, siendo [m,M el intervalo característico o de optimalidad de B con: m= max (-bi’/ bi*’ , i/ bi*’ >0) o m=- si bi*’ 0 i M= min (-bi’/ bi*’ , i / bi*’ <0) o M=+ si bi*’ 0 i • Esquema del algoritmo utilizado: el mismo que en el paramétrico de costos, pero utilizando el simplex dual.
NOTAS: • Los intervalos característicos de las bases óptimas sucesivamente calculadas, no se superponen, salvo en los extremos de los intervalos. • Los intervalos donde la función objetivo z(x) es no factible son intervalos de la forma: (-, *) o (*,+) • En el algoritmo, una vez que el deja el intervalo característico, la base óptima no se vuelve a repetir. Si se utilizan las técnicas de no degeneración, para un fijo, no hay ciclos. Como el número total de bases posibles es finito, el proceso siempre termina, con un número finito de intervalos. • En c/ intervalo característico si bien se fija el para hacer el cálculo, el objetivo y la solución son funciones lineales de . • El valor del objetivo al final y al principio de dos intervalos consecutivos son iguales. • El costo óptimo de un problema lineal paramétrico es una función de lineal a trazos y contínua.
Teorema 1: El valor óptimo de la función objetivo z(),en un problema de optimización lineal, paramétrico en los términos independientes es: • una función lineal a trazos convexa en el parámetro si el problema es de minimización • una función lineal a trazos cóncava en el parámetro si el problema es de maximización Teorema 2: El valor óptimo de la función objetivo z() , en un problema de optimización lineal, paramétrico en los costos es: • una función lineal a trazos cóncava en el parámetro si el problema es de minimización • una función lineal a trazos convexa en el parámetro si el problema es de maximización