Download
1 / 6
60 likes | 267 Views
Challenge #1 – Relay Race. Robot #1 will be randomly placed on starting line #1, #2 or #3. Robot #1 will drive until it detects the “Dark Line” - Robot #1 will transmit to Robot #2 that it has finished its leg of the race.

E N D
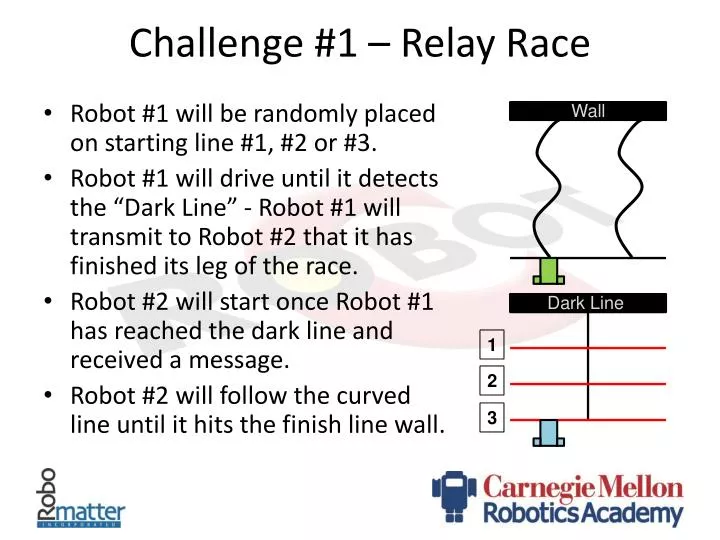
Challenge #1 – Relay Race • Robot #1 will be randomly placed on starting line #1, #2 or #3. • Robot #1 will drive until it detects the “Dark Line” - Robot #1 will transmit to Robot #2 that it has finished its leg of the race. • Robot #2 will start once Robot #1 has reached the dark line and received a message. • Robot #2 will follow the curved line until it hits the finish line wall. Wall Dark Line 1 2 3
Challenge #2 – Grid Navigation Rules: • Robot #1 (Blue) will have a sonar sensor and a light sensor. • Robot #2 (Green) will have a “claw” and a light sensor. • Field will be a 5x10 9-inch spaced “grid world” • Total board size is 45 inches by 93 inches (4x8 sheet with 1 ½ inches cut off each side – to fit in an FLL size game board) • The location of the ball, wall and goals will vary between each run, but will always remain in the same “column” of the grid.
Challenge #2 – Grid Navigation • Objective #1 – Detect the Wall • Robot #1 (Blue) will drive forward and detect the wall. • Robot #1 should measure the number of grid spaces to determine the location of the wall and transmit this information to Robot #2 (Green)
Challenge #2 – Grid Navigation • Objective #2 – Drive to the Ball • Robot #2 (Green) will drive forward and detect the ball. • The Red/Blue balls will be from a standard NXT kit • The ball will on a 3 inch tall PVC Pipe • Robot #2 should use the information Robot #1 (Blue) sent to determine the distance.
Challenge #2 – Grid Navigation • Objective #3 – Determine the color of the ball • Robot #2 (Green) will determine the color of the ball (either blue or red)– this will be demonstrated by knocking the ball into the correct “Goal”. • Each “run” will randomly have either a blue or red ball.
Challenge #2 – Grid Navigation • Objective #4 – Defending the goal • Robot #1 (Blue) will drive into the opposing colored goal (opposite of the color of the ball) • To complete this, Robot #2 (Green) has to transmit the color of the ball that it found.