Download
1 / 1
10 likes | 114 Views
System. Olga Brukman, Shlomi Dolev Computer Science Department Ben-Gurion University Israel {brukman, dolev}@cs.bgu.ac.il. Environment. SASO 2008 - Poster. System. C 1. Environment. s start =max{BSP[s,|bhv|].pr}. s bes t =max{BSP[s,k].pr}. BSP[s start ,k]. σ. BSP[s start ,k]. σ.

E N D
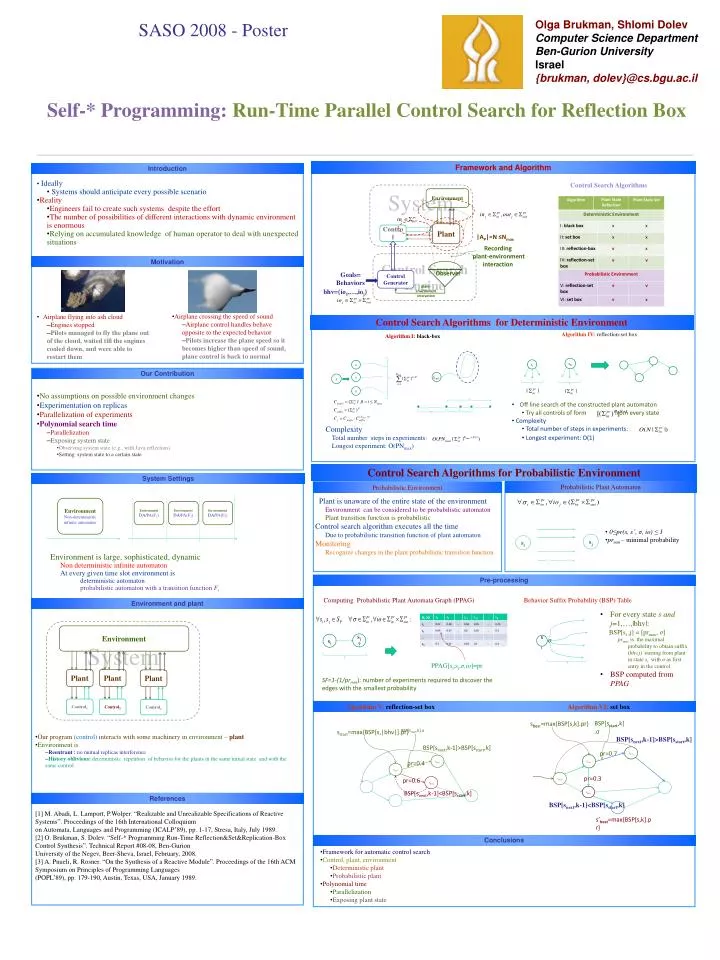
System Olga Brukman, Shlomi Dolev Computer Science Department Ben-Gurion University Israel {brukman, dolev}@cs.bgu.ac.il Environment SASO 2008 - Poster System C1 Environment sstart=max{BSP[s,|bhv|].pr} sbest=max{BSP[s,k].pr} BSP[sstart,k].σ BSP[sstart,k].σ in’1…...., in’m sN s s1 …. out’1,……,out’n • Environment • Non-deterministic infinite automaton σΣ σΣ σ1 σ1 • Environment • DA/PA(F1) • Environment • DA/PA(F2) • Environment • DA/PA(F3) ... ... Plant σ2 σ2 |AP|=N ≤Nmax C2 Control x∙P BSP[snext,k-1]>BSP[sstart,k] BSP[snext,k-1]>BSP[sstart,k] in1,.., ink s s out1, …,outl … Ap snext snext σ1, io1,1, pr1,1 pr=0.7 pr=0.4 in’’1...., in’’m in’1...., in’m Recording plant-environment interaction in’1….., in’m CM scurr s sbest pr1 sstart t t σ1, io1,2 ,pr1,2 out’1,……,out’n out’’1,……,out’’n out’1,……,out’n Control Search Engine σm, iom,1 ,prm,1 Plant pr=0.6 Plant Plant snext prmax sstart pr=0.3 Self-* Programming: Run-Time Parallel Control Search for Reflection Box σ si BSP[snext,k-1]<BSP[sstart,k] σm, iom,2 ,prm,2 pr2 snext Observer bhv={io1,…,ioj} Goals= Behaviors Control Generator Control1 Control1 BSP[snext,k-1]<BSP[sstart,k] Control2 pr3 plant-environment interaction s’best=max{BSP[s,k].pr} j Framework and Algorithm Introduction • Ideally • Systems should anticipate every possible scenario • Reality • Engineers fail to create such systems despite the effort • The number of possibilities of different interactions with dynamic environment is enormous • Relying on accumulated knowledge of human operator to deal with unexpected situations Control Search Algorithms Motivation • Airplane crossing the speed of sound • Airplane control handles behave opposite to the expected behavior • Pilots increase the plane speed so it becomes higher than speed of sound, plane control is back to normal • Airplane flying into ash cloud • Engines stopped • Pilots managed to fly the plane out of the cloud, waited till the engines cooled down, and were able to restart them Control Search Algorithms for Deterministic Environment Algorithm IV: reflection-set box Algorithm I: black-box Our Contribution sstart • No assumptions on possible environment changes • Experimentation on replicas • Parallelization of experiments • Polynomial search time • Parallelization • Exposing system state • Observing system state (e.g., with Java reflection) • Setting system state to a certain state P(Nmax +1) • Off line search of the constructed plant automaton • Try all controls of form from every state • Complexity • Total number of steps in experiments: • Longest experiment: O(1) sP_1 sP_2 sP_3 scurr … P 0<i≤Nmax P sP_N_max+1 • Complexity • Total number steps in experiments: • Longest experiment: O(PNmax) Control Search Algorithms for Probabilistic Environment System Settings Probabilistic Plant Automaton Probabilistic Environment • Plant is unaware of the entire state of the environment • Environment can be considered to be probabilistic automaton • Plant transition function is probabilistic • Control search algorithm executes all the time • Due to probabilistic transition function of plant automaton • Monitoring • Recognize changes in the plant probabilistic transition function • 0≤pr(s, s’, σ, io) ≤ 1 • prmin – minimal probability • Environment is large, sophisticated, dynamic • Non deterministic infinite automaton • At every given time slot environment is • deterministic automaton • probabilistic automaton with a transition function Fi sj si … Pre-processing Computing Probabilistic Plant Automata Graph (PPAG) Behavior Suffix Probability (BSP) Table Environment and plant • For every state s and j=1,…,|bhv|: • BSP[si ,j] = [prmax, σ] • prmax is the maximal probability to obtain suffix (bhv,j) starting from plant in state si with σas first entry in the control • BSP computed from PPAG σ sj? si io? SF times PPAG[si,sj,σ,io]=pr • SF=1-(1/prmin): number of experiments required to discover the edges with the smallest probability Algorithm V: reflection-set box Algorithm VI: set box • Our program (control) interacts with some machinery in environment – plant • Environment is • Reentrant : no mutual replicas interference • History oblivious: deterministic repetition of behavior for the plants in the same initial state and with the same control References [1] M. Abadi, L. Lamport, P.Wolper. “Realizable and Unrealizable Specifications of Reactive Systems”. Proceedings of the 16th International Colloquium on Automata, Languages and Programming (ICALP’89), pp. 1-17, Stresa, Italy, July 1989. [2] O. Brukman, S. Dolev. “Self-* Programming Run-Time Reflection&Set&Replication-Box Control Synthesis”. Technical Report #08-08, Ben-Gurion University of the Negev, Beer-Sheva, Israel, February, 2008. [3] A. Pnueli, R. Rosner. “On the Synthesis of a Reactive Module”. Proceedings of the 16th ACM Symposium on Principles of Programming Languages (POPL’89), pp. 179-190, Austin, Texas, USA, January 1989. Conclusions • Framework for automatic control search • Control, plant, environment • Deterministic plant • Probabilistic plant • Polynomial time • Parallelization • Exposing plant state