Download
1 / 13
130 likes | 276 Views
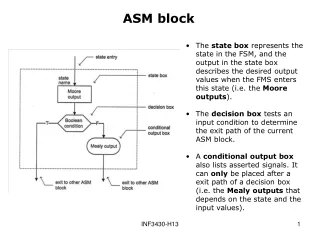
Texture description based on Taylor series Grids centered at the landmarks for local analysis Non linear classifier (kNN) for inside-outside labeling. outside. inside. 2. 1. Optimal Features ASM .

E N D
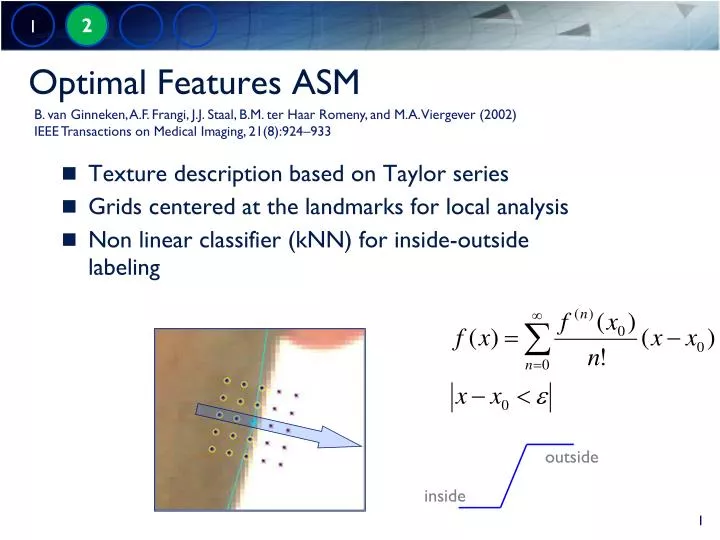
Texture description based on Taylor series Grids centered at the landmarks for local analysis Non linear classifier (kNN) for inside-outside labeling outside inside 2 1 Optimal Features ASM B. van Ginneken, A.F. Frangi, J.J. Staal, B.M. terHaarRomeny, and M.A. Viergever (2002) IEEE Transactions on Medical Imaging, 21(8):924–933
Face is too complex for the proposed labeling Thin zones generate profile variations Classes unbalance in high curvature points kNN slow (set dependent) Image features dependent on rotation 2 1 Optimal Features ASM
2 1 Invariant Optimal Features ASM F.M. Sukno, S. Ordas, C. Butakoff, S. Cruz, and A.F. Frangi IEEE Transactions on Pattern Analysis and Machine Intelligence, 29(7):1105–1117
Distance-based labeling 2 1 Invariant Optimal Features ASM 180 profiles of man and women with IOF-ASM
i 1 0 k-1 Z k-2 2 1 Invariant Optimal Features ASM • Multi-valued neuron classifier • Single neuron • Very fast • Appropriate combination of derivatives allows for invariance to rigid transformations
2 1 Segmentation tests Experimentson 3400+ images Point to curve error Point to point error
2 1 IOFASM vs ASM
2 1 IOFASM vs ASM IOF-ASM ASM
Based on texture Eigenfaces-like approach from the segmentation results 2 1 Identity Verification: Texture
2 1 Identity Verification: Texture
2 1 Related work
2 1 Conclusions on IOF-ASM • By using more elaborate descriptions of the texture it is possible to increase the accuracy of ASMs • IOF-ASM provides a generic framework • Features are optimized for every landmark • Allows for a trade off between accuracy and speed • Feature selection: –15% error / –50% time • About 30% more accurate than ASM in facial feature localization • Derives in better identification rates • Invariant to in-plane rotations
2 1 3 Out-of-plane Rotations • Environment constraints • Surveillance systems • Car driver images • ASM: • Similarity does not remove 3D pose • Multiple-view database • Other approaches • Non-linear models • 3D models: multiple views AV@CAR Database