Download
1 / 1
10 likes | 186 Views
Accelerometer based localization for distributed off-the-shelf robots (Cots-Bots) Thomas Cheng, Sarah Bergbreiter Advisor: Prof. K.S.J. Pister. Hardware/software setup. Objectives. Explore the possibility of using accelerometers as an instrument to localize robots in short range.

E N D
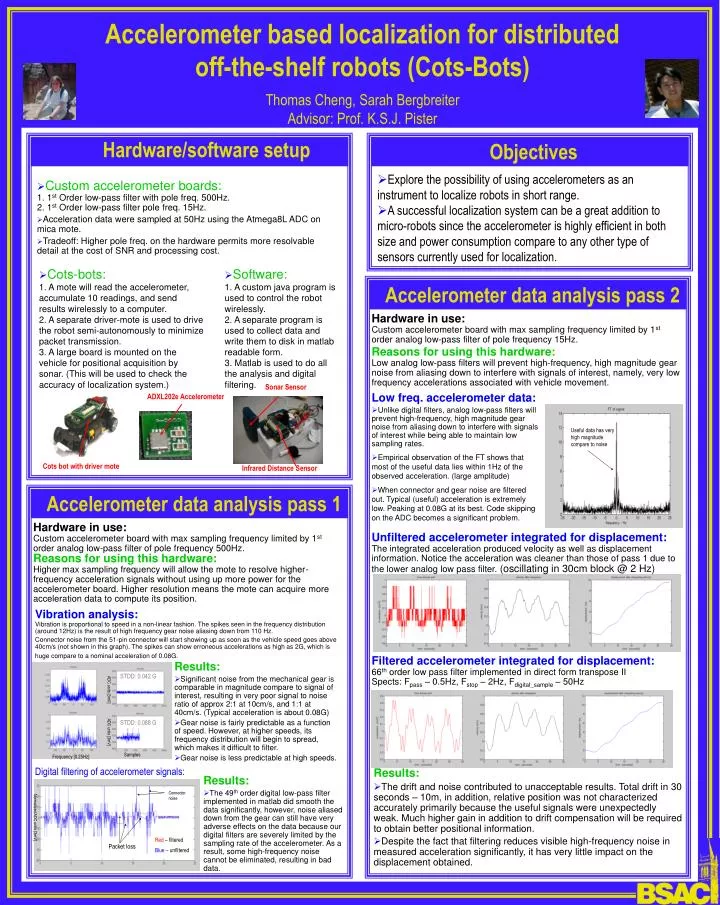
Accelerometer based localization for distributed off-the-shelf robots (Cots-Bots) Thomas Cheng, Sarah Bergbreiter Advisor: Prof. K.S.J. Pister Hardware/software setup Objectives • Explore the possibility of using accelerometers as an instrument to localize robots in short range. • A successful localization system can be a great addition to micro-robots since the accelerometer is highly efficient in both size and power consumption compare to any other type of sensors currently used for localization. • Custom accelerometer boards:1. 1st Order low-pass filter with pole freq. 500Hz. 2. 1st Order low-pass filter pole freq. 15Hz. • Acceleration data were sampled at 50Hz using the Atmega8L ADC on mica mote. • Tradeoff: Higher pole freq. on the hardware permits more resolvable detail at the cost of SNR and processing cost. • Cots-bots:1. A mote will read the accelerometer, accumulate 10 readings, and send results wirelessly to a computer. 2. A separate driver-mote is used to drive the robot semi-autonomously to minimize packet transmission. 3. A large board is mounted on the vehicle for positional acquisition by sonar. (This will be used to check the accuracy of localization system.) • Software:1. A custom java program is used to control the robot wirelessly.2. A separate program is used to collect data and write them to disk in matlab readable form.3. Matlab is used to do all the analysis and digital filtering. Accelerometer data analysis pass 2 Hardware in use:Custom accelerometer board with max sampling frequency limited by 1st order analog low-pass filter of pole frequency 15Hz. Reasons for using this hardware:Low analog low-pass filters will prevent high-frequency, high magnitude gear noise from aliasing down to interfere with signals of interest, namely, very low frequency accelerations associated with vehicle movement. Sonar Sensor ADXL202e Accelerometer • Low freq. accelerometer data: • Unlike digital filters, analog low-pass filters will prevent high-frequency, high magnitude gear noise from aliasing down to interfere with signals of interest while being able to maintain low sampling rates. • Empirical observation of the FT shows that most of the useful data lies within 1Hz of the observed acceleration. (large amplitude) • When connector and gear noise are filtered out. Typical (useful) acceleration is extremely low. Peaking at 0.08G at its best. Code skipping on the ADC becomes a significant problem. Useful data has very high magnitude compare to noise Cots bot with driver mote Infrared Distance Sensor Accelerometer data analysis pass 1 Hardware in use:Custom accelerometer board with max sampling frequency limited by 1st order analog low-pass filter of pole frequency 500Hz. Unfiltered accelerometer integrated for displacement: The integrated acceleration produced velocity as well as displacement information. Notice the acceleration was cleaner than those of pass 1 due to the lower analog low pass filter. (oscillating in 30cm block @ 2 Hz) Reasons for using this hardware:Higher max sampling frequency will allow the mote to resolve higher-frequency acceleration signals without using up more power for the accelerometer board. Higher resolution means the mote can acquire more acceleration data to compute its position. Vibration analysis: Vibration is proportional to speed in a non-linear fashion. The spikes seen in the frequency distribution (around 12Hz) is the result of high frequency gear noise aliasing down from 110 Hz. Connector noise from the 51-pin connector will start showing up as soon as the vehicle speed goes above 40cm/s (not shown in this graph). The spikes can show erroneous accelerations as high as 2G, which is huge compare to a nominal acceleration of 0.08G. • Filtered accelerometer integrated for displacement: 66th order low pass filter implemented in direct form transpose IISpects: Fpass – 0.5Hz, Fstop – 2Hz, Fdigital_sample – 50Hz • Results: • Significant noise from the mechanical gear is comparable in magnitude compare to signal of interest, resulting in very poor signal to noise ratio of approx 2:1 at 10cm/s, and 1:1 at 40cm/s. (Typical acceleration is about 0.08G) • Gear noise is fairly predictable as a function of speed. However, at higher speeds, its frequency distribution will begin to spread, which makes it difficult to filter. • Gear noise is less predictable at high speeds. STDD: 0.042 G ADC units [3mV] ADC units [3mV] STDD: 0.088 G Samples Frequency [0.25Hz] Digital filtering of accelerometer signals: • Results: • The drift and noise contributed to unacceptable results. Total drift in 30 seconds – 10m, in addition, relative position was not characterized accurately primarily because the useful signals were unexpectedly weak. Much higher gain in addition to drift compensation will be required to obtain better positional information. • Despite the fact that filtering reduces visible high-frequency noise in measured acceleration significantly, it has very little impact on the displacement obtained. • Results: • The 49th order digital low-pass filter implemented in matlab did smooth the data significantly, however, noise aliased down from the gear can still have very adverse effects on the data because our digital filters are severely limited by the sampling rate of the accelerometer. As a result, some high-frequency noise cannot be eliminated, resulting in bad data. Connector noise Normalized ADC units [3mV] Red – filtered Blue – unfiltered Packet loss