Download
1 / 9
90 likes | 276 Views
Adam Waite 2/7/08 Dynamics and Control Gaussian Probability Function Collaboration with Mike Walker. Gaussian Probability Method. Inputs Average Value of Parameter (ex. Isp , wind speed, mass flow rate) Standard Deviation Create an array (ex. input = [ AvWindSpeed , StdDevWind ])

E N D
Adam Waite2/7/08Dynamics and ControlGaussian Probability FunctionCollaboration with Mike Walker AAE 450 Spring 2008
Gaussian Probability Method • Inputs • Average Value of Parameter (ex. Isp, wind speed, mass flow rate) • Standard Deviation • Create an array (ex. input = [AvWindSpeed, StdDevWind]) • Output • Randomized value for the Parameter based on Gaussian Probability Model ex. WindSpeed = Gauss_Density(input) Example using WindSpeed equal to 20 m/s with StdDev = 1 m/s By Adam Waite AAE 450 Spring 2008 Dynamics and Control
Implementing Gaussian Function • Currently used by the simulator for thrust, mass flow rate, and wind speed • Need standard deviation values for: -Isp, mdot, wind speed Location of Gauss Function is in DNC subgroup in Sim 2.05 folder Future Work Simulink by Mike Walker and Adam Waite • Finalize controller • Set up program for Monte Carlo simulation • Investigate hardware necessary to implement controller AAE 450 Spring 2008 Dynamics and Control
References • Smith, Julius O. Spectral Audio Signal Processing, March 2007 Draft, http://ccrma.stanford.edu/~jos/sasp/, Stanford University • The MathWorks Inc., “gaussmf help file,” 2007 AAE 450 Spring 2008 Dynamics and Control
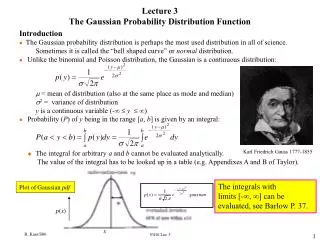
Derivation of Gaussian Function • This is the main Gaussian equation • Rearrange the function to solve for the variable x • Matlab is then used to pick a random number between 0 and 2 to put as the function f • If the number is between 0 and 1, the negative square root is used • If the number is between 1 and 2, the positive square root is used • This is the Gauss_Density function with average value and sigma as inputs Derivation by Mike Walker AAE 450 Spring 2008
Gauss_Density Function %ISP Variance function for integration with DNC SIM %By: Mike Walker %January 31 2008 function Value = Gauss_Density(inp) %sigma is sqrt(9) = 3 format long g MEAN=inp(1); sig=inp(2); num_rand = 2.*rand; if(num_rand <=1) r= num_rand; x1 = -sqrt(-2*sig*sig*log(r))+MEAN; else r=num_rand -1; x1 = sqrt(-2*sig*sig*log(r))+MEAN; end Value = x1; Function by Mike Walker AAE 450 Spring 2008
Test File % Test Run for Wind Speed Values % Adam Waite clear clc close all AvWindSpeed = 20; sigma = 1; input = [AvWindSpeed, sigma]; for t = 1:1000 WindSpeed(t) = Gauss_Density(input); end % For infinite iterations, the averaged values for WindSpeed % Should be equal to the given average value number = sum(WindSpeed)/length(WindSpeed) Test File for Gauss_Density function by Adam Waite AAE 450 Spring 2008
Old Method Using Simulink Block Simulink by Adam Waite • Used a randomizer block that needed the average value and the variance • Can be seen in the above model as Thrust Value Randomizer • Used for thrust and wind direction AAE 450 Spring 2008
Old Method (cont.) Simulink by Adam Waite • Reasons for Not Using this Method • Simulink block also required a seed number which produced the same “randomizations” for every run • Required a for loop in Matlab to run through different seed numbers for each use of the block which would slow down the program • Did not use Gaussian method AAE 450 Spring 2008