Download
1 / 1
20 likes | 278 Views
EHPV Technology. Auto-Calibration and Control Applied to Electro-Hydraulic Valves. by Patrick Opdenbosch. LEARNING CONTROL The control input is composed of: Feedback compensation via online identification of trajectory error parameters

E N D
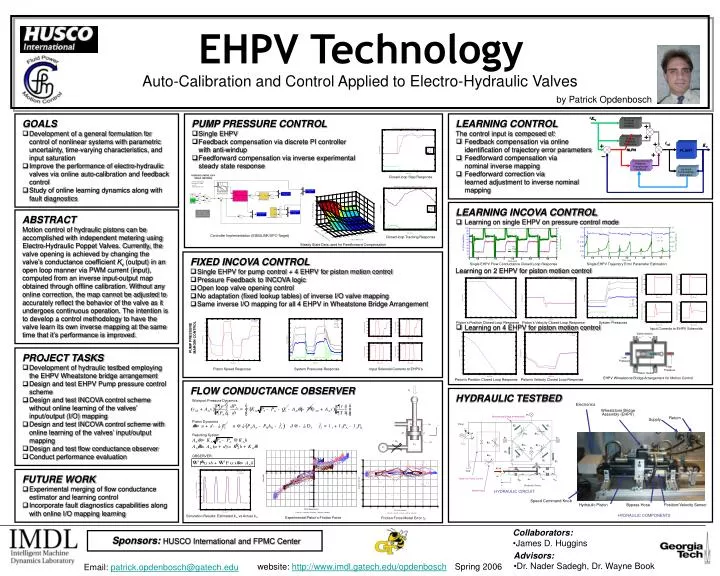
EHPV Technology Auto-Calibration and Control Applied to Electro-Hydraulic Valves by Patrick Opdenbosch • LEARNING CONTROL The control input is composed of: • Feedback compensation via online identification of trajectory error parameters • Feedforward compensation via nominal inverse mapping • Feedforward correction via learned adjustment to inverse nominal mapping • GOALS • Development of a general formulation for control of nonlinear systems with parametric uncertainty, time-varying characteristics, and input saturation • Improve the performance of electro-hydraulic valves via online auto-calibration and feedback control • Study of online learning dynamics along with fault diagnostics • PUMP PRESSURE CONTROL • Single EHPV • Feedback compensation via discrete PI controller with anti-windup • Feedforward compensation via inverse experimental steady state response Closed-loop Step Response • LEARNING INCOVA CONTROL • Learning on single EHPV on pressure control mode • Learning on 2 EHPV for piston motion control • Learning on 4 EHPV for piston motion control ABSTRACT Motion control of hydraulic pistons can be accomplished with independent metering using Electro-Hydraulic Poppet Valves. Currently, the valve opening is achieved by changing the valve’s conductance coefficient Kv (output) in an open loop manner via PWM current (input), computed from an inverse input-output map obtained through offline calibration. Without any online correction, the map cannot be adjusted to accurately reflect the behavior of the valve as it undergoes continuous operation. The intention is to develop a control methodology to have the valve learn its own inverse mapping at the same time that it’s performance is improved. Controller Implementation (SIMULINK/XPC-Target) Closed-loop Tracking Response Steady State Data used for Feedforward Compensation • FIXED INCOVA CONTROL • Single EHPV for pump control + 4 EHPV for piston motion control • Pressure Feedback to INCOVA logic • Open loop valve opening control • No adaptation (fixed lookup tables) of inverse I/O valve mapping • Same inverse I/O mapping for all 4 EHPV in Wheatstone Bridge Arrangement Single EHPV Flow Conductance Closed Loop Response Single EHPV Trajectory Error Parameter Estimation Piston’s Position Closed Loop Response Piston’s Velocity Closed Loop Response System Pressures Input Currents to EHPV Solenoids PUMP PRESSURE MARGIN CONTROL • PROJECT TASKS • Development of hydraulic testbed employing the EHPV Wheatstone bridge arrangement • Design and test EHPV Pump pressure control scheme • Design and test INCOVA control scheme without online learning of the valves’ input/output (I/O) mapping • Design and test INCOVA control scheme with online learning of the valves’ input/output mapping • Design and test flow conductance observer • Conduct performance evaluation Piston Speed Response System Pressures Response Input Solenoid Currents to EHPV’s EHPV Wheatstone Bridge Arrangement for Motion Control Piston’s Position Closed Loop Response Piston’s Velocity Closed Loop Response FLOW CONDUCTANCE OBSERVER HYDRAULIC TESTBED Workport Pressure Dynamics Electronics Wheatstone Bridge Assembly (EHPV) Wheatstone Bridge Arrangement Return Supply Piston Dynamics Resulting System OBSERVER: • FUTURE WORK • Experimental merging of flow conductance estimator and learning control • Incorporate fault diagnostics capabilities along with online I/O mapping learning Valves for Pump Control Needle Valve HYDRAULIC CIRCUIT Speed Command Knob Hydraulic Piston Bypass Hose Position/Velocity Sensor Simulation Results: Estimated KA vs Actual KA HYDRAULIC COMPONENTS Experimental Piston’s Friction Force Friction Force Model Error Df • Collaborators: • James D. Huggins Sponsors: HUSCO International and FPMC Center • Advisors: • Dr. Nader Sadegh, Dr. Wayne Book website: http://www.imdl.gatech.edu/opdenbosch Spring 2006 Email: patrick.opdenbosch@gatech.edu