Download
1 / 39
450 likes | 750 Views
Vertical Take-off and Landing Electric Aircraft. Villanova University College of Engineering 2007 - 2008 Senior Design Project. The Team. Dustin Getz, CpE microcontroller hardware-software interface Christopher Pepper, EE ECE leader control circuits Karl Recktenwald, ME frame

E N D
Vertical Take-off and Landing Electric Aircraft Villanova University College of Engineering 2007 - 2008 Senior Design Project
The Team Dustin Getz, CpE microcontroller hardware-software interface Christopher Pepper, EE ECE leader control circuits Karl Recktenwald, ME frame fabrication Richard Zemsky, ME ME leader overall design
Project Goal • Goal: • To develop a scale prototype of an electric-powered aircraft • Vertical take-off and landing • No exposed main rotor • Computer-facilitated control • Scope: • Develop a suitable aircraft configuration • Design the control system • Motivation: • Personal, small-scale transport • Efficiency and environmental friendliness
Focus points • Feasibility • weight, power, money • Design • mechanical hardware selection and configuration • electrical hardware selection and configuration • Control • environment sensors • algorithms and simulation
Overall Design Inspiration for aircraft configuration http://www.marian-aldenhoevel.de/modelle/BeechStarship.jpg
Mass 1.80 kg Weight 17.66 N Desired Acceleration 0.80 m/s2 Required Net Thrust 1.44 N Total Required Thrust 19.10 N Specifications After 5 sec: height = 10 m Ftot = Fhover + Faccel
Feasibility Selecting suitable motors and fans: Duct size Air velocity Maximum Thrust Maximum Power Selected Duct Diameter: 5.6 cm http://www.hobby-lobby.com/ductfan.htm
Feasibility (continued) For Duct Diameter: 5.6 cm Dotted lines denote the projected ducted fan operating point Calculations validate fan specs. Thrust per fan > 20 ozf. (5.56 N) Total Thrust > 22.24 N x 4 fans
y z x Design Features Overview: 4 ducted fans 3 thrust locations Redirect thrust to enable vertical and conventional flight modes Automatic stabilization of the craft via on-board sensors and programmed control laws fully stable in x-z plane
Design (continued) • Ducted fans: • 4 fans with DC brushless motors • 3 points of thrust (stability) • 2 front fans on either side of fuselage • 2 rear fans side by side = 2 + 1 http://www.hobby-lobby.com/ductfan.htm http://www.hobby-lobby.com/littlescreamers.htm
First Flight Attempt: Response Rear Duct Design • Two 45° pipes • Rotate 2nd pipe through 180° Vertical Mode Horizontal Mode
Design (continued) Vertical Flight Mode
Design (continued) Horizontal Flight Mode
ρcf = 1384 kg/m3 σcf = 827.4 MPa ρAl = 2699 kg/m3 2518 psi 3.663 psi σAl = 379.2 MPa Structural Analysis • Frame: • Weight = 244.5 g • Carbon fiber, epoxy • Structural analysis performed ρ ≡ density σ≡ tensile strength
Inclinometer 6 Signals Electrical: Block Diagram Receiver Power x4 x4 MCU Voltage Controllers 3 Signals 2 Unique + 1 Shared Fan Motors 2 Signals Aircraft Power Range Sensor Receiver 5 Signals x5 6 Signals Servomotor Power Servomotors Lithium Polymer Batteries x5 Transmitter
Electrical: Circuit Design • Motor controllers (x4) • –Jeti Advance PLUS • – Rated for 18 Amp • Batteries (x5) • – Thunder Power "Pro Lite" Lithium Polymer Packs • – 4 Cell 1320 mAh • Radio Controller • – OPTIC 6: Programmable Radio Control System • – 6 Channels • – Multiple Flight Modes
Electrical: Circuit Connections • Speed 400 Polarized Connectors • – Batteries • – Motor Controllers • – Power lines Power Line Ring Terminals • 1-pin Female to Female Jumper • – Inclinometer • – Range Sensor • – Peripheral power line • – Motor Controllers • Molex Connections • – Motor Controllers • – Motors
First Flight Attempt • Craft was too heavy • Failed to create positive lift • Responses: • Disassemble the aircraft and audit the weight • Measure motor thrust
1847g 2123g Initial Final Weight Reduction • Drilled holes in braces ……………………….. -37g • Cut and sanded rear duct pipes …………….. -146g • Replaced metal bolts with nylon bolts ………-18g • Replaced circuit plate ………………………-75g 276g (13%) reduction Reductions
Fan Performance Test Setup Front Fan Rear Fan + Duct Hall Effect Ammeter Counter-balance weights Force Gauge Digital Scale
Fan Performance: Results • Quantify thrust as function of power input • Front fan • Rear fan with 90° duct
Human control • Raw: Human controls motor thrust • Human • responsible for balance • corrects for environmental influences • Intelligent: Human controls craft velocity • Computer • responsible for balance • automatically corrects environmental influence
Intelligent control Microcontroller Pilot command Combined intelligent control handheld controller DC motor control lines Environment awareness Servo motor control lines orientation altitude
Digital motor control • How do you control a motor with a computer? • dsPIC 30f, 30MHz clock • 200kHz AD conversion • pulse width measurement and generation in hardware • floating point arithmetic • 68 I/O pins for sensor interfaces Coded percentage of maximum thrust Power supplied to DC motor Pulse Code Modulation
Pulse Code Modulation • Width of pulse linearly related to thrust percentage 10% thrust 90% thrust
Sensors • Awareness of height Polaroid sonic transducer, driven by SensComp range-finding module 4.5 V Voltage response to tilt • Awareness of inclination (roll, pitch) VTI SCA100T 0.5 V -30 +30
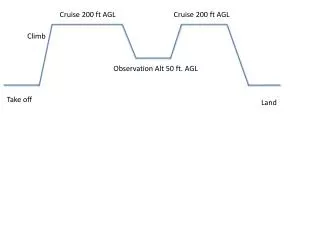
Altitude control • Use throttle to control velocity • Behaves like critically damped spring: transitions as fast as possible, without ringing Up, neutral Up, down, neutral Throttle command Thrust response Altitude response
Sum of Torques: Desired result: M = Mass Matrix θ = Angle u = Control Torque k, c = PD Constants Resulting Control Torque: Electrical: Control Laws • Developed equations of motion with help of Dr. Ashrafiuon via LaGrangian derivation approach. • Will use zero-dynamic control to balance platform
Simulation of Pitch Stability • Noise of maximum amplitude 4N•m and initial angle of 60° • Control torque magnitude limited to .8 N•m – motor limitations • Maximum angular displacement is 2 degrees after initial correction Control Torque .8 N•m -.8 N•m 2.0s 0.0s Noise Torque Angular Displacement 60° 10 N•m -10 N•m 0° 2.0s 0.0s 0.0s 2.0s
Funding Keystone Innovation Zone $2000 Engineering Alumni Society $800 VU Mechanical Engineering Department $500 VU Electrical & Computer Engineering Department $500 Hobby Lobby Parts Donation Funding
Conclusions • Scalability: • Non-linear • Problems scaling up electric motors (weight) • Configuration: • 3 thrust locations • 4 motors can reduce to 3 • 1 large rear motor, 2 smaller forward motors • Controllability: • The system is stable, robust, and controllable
Funding Keystone Innovation Zone Engineering Alumni Society Mechanical Engineering Department Electrical & Computer Engineering Department Advisors Dr. Chun (ME) and Dr. Singh (ECE) Consultants Dr. Marston – Total Design Dr. Ashrafiuon – Controls Mr. Harris – Microcontroller Mr. Pluscauskis – Structural Analysis Villanova Technicians Acknowledgments