Download
1 / 20
200 likes | 428 Views
COMPUTING THE RECURSIVE POSTERIOR CRAMER-RAO BOUND FOR A NONLINEAR NONSTATIONARY SYSTEM. Brian P. Flanagan bflan@mitre.org 703-883-6447. John A. Uber johnuber@mitre.org 703-883-7195. Robert M. Taylor Jr. rtaylor@mitre.org 703-883-5263. The MITRE Corporation 7515 Colshire Drive

E N D
COMPUTING THERECURSIVE POSTERIOR CRAMER-RAO BOUNDFOR ANONLINEAR NONSTATIONARY SYSTEM Brian P. Flanagan bflan@mitre.org 703-883-6447 John A. Uber johnuber@mitre.org 703-883-7195 Robert M. Taylor Jr. rtaylor@mitre.org 703-883-5263 The MITRE Corporation 7515 Colshire Drive McLean, VA 22102 http://www.mitre.org Poster Presentation for IEEE ICASSP 2003
Slide 3 Slide 4 Slide 5 Slide 6 Slide 7 Slide 8 Poster Presentation Layout Title/Authors/Affiliations (Slide1) Introduction Computing the PCRB Simulation Example Slide 9 Slide 10 Slide 15 Slide 16 Slide 11 Slide 17 Motivation Validating the PCRB Results and Conclusion Slide 12 Slide 13 Slide 18 Slide 19 Slide 14 Slide 20
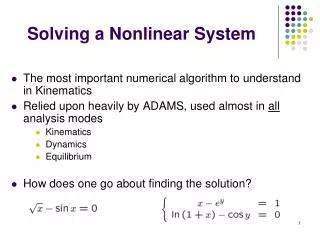
Problem Statement Given • Discrete Process model • Discrete Observation model Compute • Minimum mean square error (MMSE) bound on estimate
Dynamic Process Model A posteriori pdf at time k-1 A priori pdf at time k-1 A posteriori pdf at time k Sequential Bayesian Estimation Prediction equation Update equation Observation Model
The stochastic system models can be nonlinear, time-varying, and non-Gaussian in general. • Probability density functions completely capture all statistical-physical relationships. • Applications of Bayesian estimation are ubiquitous--radar/sonar tracking, wireless communications, econometrics
The trackers are unbiased state estimators for the true target state . We are interested in bounding the mean square error of unbiased estimators. Posterior Cramer-Rao Bound (PCRB) We would like a lower bound on the covariance of a tracker defined by the following process and observation model: Process pdf Observation pdf in which is the posterior Fisher information matrix defined as Expectation w.r.t. posterior density
Implementing the Recursive PCRB From the previous Fischer information we have: and we initialize the recursion with:
Batch form of PCRB first proposed by Van Trees (1968). • Tichavsky et. al. (1998) derived recursive form of PCRB. • Exact PCRB generally intractable and must use approximations for the expectation integrals.
Samples: Sequential Monte Carlo Integration Recall from the recursive PCRB formulation the last Fisher sub-block Intractable Expectation Integral Monte Carlo Integration Sample weights
PCRB via Sequential Monte Carlo System Jacobians and Hessians SMC
Inverse Fisher Information Matrix (FIM) computed via linearization exactly matches covariance estimate in an Extended Kalman Filter. • Inverse FIM computed using SMC is similar to Particle Filter (PF) algorithm and generalizes better for time-varying nonlinear systems.
weighted samples used to approximate the a posterioripdf Sequential Monte Carlo Pictorial A posteriori at k-1 Importance Sampling drift Process Model diffuse Observe Model measure A posteriori at k Importance Sampling Figure adapted from Isard and Blake “CONDENSATION—Conditional density propagation for visual tracking”, IJCV, 1998.
Particle Filter (PF) Algorithm • 0. From the previous sample set • 1. Select a sample as follows for each of N new samples: • a. Generate random number uniformly distributed • b. Find smallest l for which • c. Set • 2. Predict by sampling from to choose . • 3. Measure and weight new positions in terms of measured features • and then normalize so that and store cumulative probabilities • so that we propagate triplet where • 4. Estimate desired moments as: • 5. Set k=k+1 and go to step 0.
The posterior density function is used both for computing the Fisher information matrix in the PCRB and the hidden state in a Bayesian estimate. • PF algorithm from Isard and Blake “CONDENSATION—Conditional density propagation for visual tracking”, IJCV, 1998--equivalent to bootstrap filter proposed by Gordon et al.
where the state to be solved for evolves in a chaotic fashion and Time-Varying Logistic Function We test algorithm with a scalar nonlinear time-varying system
True and Estimated Signal Plots Particle Filter Estimate
The evolution of the state function produces states that are roughly distributed according to the arcsine distribution. • The time-varying logistic function is sufficiently nonlinear to cause an extended Kalman filter to fail--but not the particle filter.
Mean Square Error Versus PCRB Posterior Cramer-Rao Bound
Conclusion • The PCRB accurately bounds the mean square error for unbiased sequential Bayesian estimators as shown theoretically and demonstrated against nonlinear Minimum Mean Square Error (MMSE) estimators. • The PCRB can only be approximated since the expectation integrals are intractable for nonlinear system models. • The PCRB computed using sequential Monte Carlo (SMC) requires computing a Jacobian and Hessian of the system model with respect to state. • The PCRB computed using sequential Monte Carlo is very computationally efficient for low dimensional parameter spaces.
Bibliography • Tichavsky, P., Muravchik, C., and Nehorai, A. Posterior Cramer-Rao Bounds for Discrete-Time Nonlinear Filtering. IEEE Transactions on Signal Processing, Vol. 46, No. 5, May 1998. • Isard, M. and Blake, A., CONDENSATION -- conditional density propagation for visual tracking. International Journal of Computer Vision, 29, 1, 5--28, 1998. • Gordon, N. and Salmond, D., Bayesian State Estimation for Tracking and Guidance Using the Bootstrap Filter. Journal of Guidance, Control, and Dynamics. Vol. 18, No. 6, November-December 1995.