Download
1 / 27
280 likes | 431 Views
Termination Proofs for Systems Code. Andrey Rybalchenko, EPFL/MPI joint work with Byron Cook, MSR and Andreas Podelski, MPI PLDI’2006, Ottawa. Temporal verification. Basic properties of program computations: Reachability Termination Classical reduction :

E N D
Termination Proofs for Systems Code Andrey Rybalchenko, EPFL/MPI joint work with Byron Cook, MSR and Andreas Podelski, MPI PLDI’2006, Ottawa
Temporal verification • Basic properties of program computations: • Reachability • Termination • Classical reduction: From: temporal reasoning about computations To: first-order reasoning over auxiliary assertions (e.g. invariants, ranking functions) • Proof rules: • conditions on auxiliary assertions implying the property • Challenge: • find adequate auxiliary assertions automatically
State-of-the-art • Tools for reachability properties of software: • Astree, BLAST, F-Soft, MAGIC, SatAbs, SLAM,... • Termination checkers for TRS, Prolog, functional languages, ‘toy’ imperative programs: • CiME, AProVE, TerminWeb, TerminLog, PolyRank, ... • Our goal: Termination tool for software verification
Overview • Classical assertions: • reachability (invariants) • termination (ranking functions) • limitations • Transition invariants • checking • incremental construction • Practical implementation
Invariants • Given program (Init, Next) and property Good • Q: Init [ Next^+(Init) µGood ? • Find invariant Invµ States • To prove: • Init µInv • Next(Inv) µInv • InvµGood transitive closure
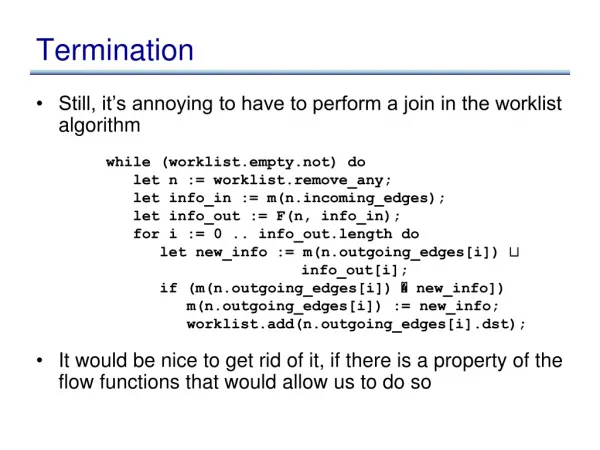
Inv: automated construction • Incremental algorithm: Inv := Init while Next(Inv) *Inv do Inv := Inv[Inv od • Failed Next(Inv) µInv checks determine Inv • Keep Inv small wrt. Good • Classical fixpoint algorithms (w/ abstraction)
Ranking functions • Given program (Init, Next) • Q: do infinite computations exists ? • Find ranking function R: States -> Naturals • Define ranking relation Rank := { (s, s’) | R(s) ¸ 0 and R(s’) ·R(s)-1 } • To prove: Next µRank • Termination proof depends on reachability: Next Å Reach µRank Ranking function R(x, y) := x Ranking relation Rank := (x ¸ 0 Æ x’· x - 1) if (y ¸ 1) { while (x ¸ 0) { x = x – y; } }
Rank: automated construction • Incremental algorithm? Rank := ; while Next *Rank do Rank := Rank[Rank od • Termination is not preserved under union operation • Abstraction is not possible Rank[Rank: {a, b} [ {b, a} = {(a,a), ...} = a, a, a, a, a, a, ...
Alternative: Transition invariants Next Å Reach µ Rank vs. Next^+ Å Reach µ Rank1[ ... [ Rankn • Transition invariant T = Rank1[ ... [ Rankn transitive closure
Transition Invariant: automated construction • Incremental algorithm: T := ; while Next^+ Å Reach *T do T := T[T od • Failed Next^+Å ... µT checks determine T • Keep Twell-founded (aka terminating) • Q: practical implementation?
Implementation subtasks T := ; while Nex^+ Å Reach *T do T := T[T od • Checking: Next^+ Å Reach µT • Incremental construction: Find T if check fails
Checking Next^+ Å (Acc £ Acc) µ T Init 3 • Monitor for T • runs in parallel with the program • inspects pairs of states wrt. T • goes to error if observes (s, s’) T (s, s’) 2 T
Monitor for T • needs to store unbounded computation prefix • trade storage for non-determinism: [Biere’02] • select arbitrarystates • for each subsequent states’ check (s, s’) 2 T • proceed in two phases: • selection • checking (s, s’) 2 T
Monitor for T: pseudo-code Storage for program states var selected := ? var phase := SELECT while True { switch (phase) { SELECT: if ( nondet() ) { selected := current phase := CHECK } CHECK: if ( (selected, current) T ) { ERROR: } } } Current program state
Monitoring T: example if (y ¸ 1) { while (x ¸ 0) { x = x – y; } } Candidate to check: T = (x ¸ 0 Æ x’ · x - 1) x y
Checking transition invariant T • Given T construct monitor MT • Construct product PT = P || MT • Apply safety checker on PT: if success: done otherwise: counterexample PT is program with ERROR location
Implementation subtasks • Checking: Next+Å (Acc £ Acc) µ T • Incremental construction: Find T if check fails T := ; while Nex^+ Å Reach *T do T := T[T od
Counterexample for T if (y ¸ 1) { while (x ¸ 0) { x = x + y; } } Candidate to check: T = (x ¸ 0 Æ x’ · x - 1) Program trace: • assume(y ¸ 1) • assume(x ¸ 0) • x := x + y • x := x + y 7£6
Lasso = Stem + Cycle Selection phase Program trace: • assume(y ¸ 1) • assume(x ¸ 0) • x := x + y • x := x + y • Counterexample = Stem.Cycle.Cycle . ... (to termination) Stem Cycle Checking phase
From lasso to T • Counterexample is spurious if Cycle^is infeasible • if exist Rank ¶Cycle then T = Rank • else return “counterexample Stem.Cycle^” Algorithms and tools exist: PolyRank, RankFinder, ...
Example T if (y ¸ 1) { while (x · z) { if (nondet()) { x = x + y; } else z = z – y; } } } Candidate to check: T = ( x · z Æ x’ ¸ x + 1 ) Counterexample (lasso): • assume(y ¸ 1) • assume(x · z) • z := z – y • T = ( x · z Æ z’· z – 1 ) Transition invariant: T = ( x · z Æ x’ · x + 1 ) Ç ( x · z Æ z’· z – 1 )
Incremental algorithm for termination Creates program with error state T := ; while True do PT := P || MT if safe( PT) then return “terminates” else Stem, Cycle := counterexample if exists Rank ¶Cycle then T := T[ Rank else return “counterexample Stem.Cycle” od Applies temporal safety checker Applies termination checker on a single path
Terminator • Input: program written in C • Output: • termination proof: transition invariant • counterexample: lasso = stem + cycle • divergence (due to the halting problem) • Language features supported • nested loops, gotos • pointers, aliasing • (mutually) recursive function calls • Implementation based on SLAM/SDV • Scalability: (on drivers from WinDDK) • several TLOC in minutes
Experiments on WinDDK Lines of code (x1000) Termination proofs Cut-point set size Termination bugs
Termination bugs • True bugs recognized by developers • Sources of false bugs: • Heap modelling • Handling of bit operations
Conclusion • Proving termination can be easy: • Temporal reduction to transition invariants [lics’04] • Incremental computation guided by counterexamples [sas’05] • Checking using tools for reachability (abstraction, lazyness, precision,...) [this paper] • Next steps: • Advanced applicability: heap, bit operations,... • General liveness properties w/ fairness
Inductive transition invariants • Reachability check for PT succeeds • Invariant InvT for PT constructed over program and monitor variables • Meaning of InvT: TInd := { (s, s’) | (s’, s) 2 InvT } TIndµ T • Next Å (Init £ States) µTInd • TInd± Next µTInd Inductive transition invariant