Download
1 / 8
140 likes | 336 Views
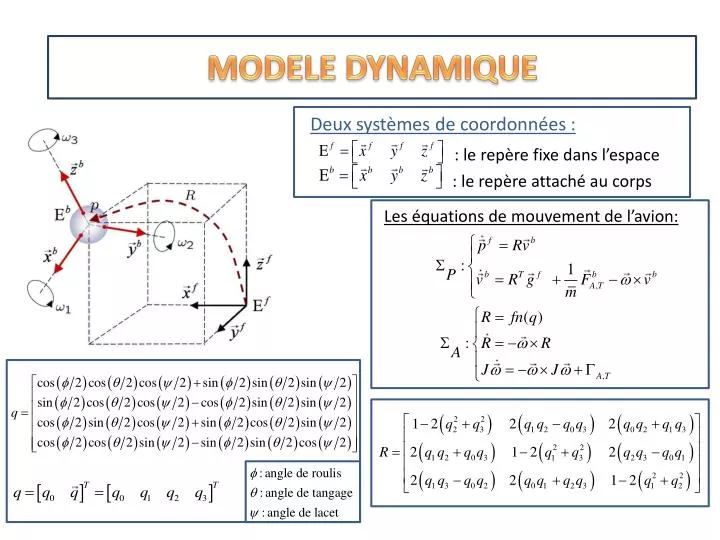
MODELE DYNAMIQUE . Deux systèmes de coordonnées : : le repère fixe dans l’espace : le repère attaché au corps . Les équations de mouvement de l’avion:. Vol horizontal (en mode avion). z. y. x. x. z.

E N D
MODELE DYNAMIQUE Deuxsystèmes de coordonnées : : le repère fixe dans l’espace : le repère attaché au corps Les équations de mouvement de l’avion:
Vol horizontal (en mode avion) z y x x z y x A: aérodynamique T: moteur e: élevon a: aileron c: canard r: rudder
Vol vertical (en mode hélicoptère) z x y x y z : la vitesse de rotation de chaque moteur A: aérodynamique T: moteur e: élevon a: aileron c: canard r: rudder slip: slipstream Théorème de Bernoulli:
free: freestream fn(): fonction nonlinéaire dépendant à alpha et le profil des ailes (voir la figure)
Loi de commande Loi de commande de l’altitude Loi de commande de l’attitude Une trajectoire, basé sur le profil trapézoïdal de vitesse:
STRATEGIE DE COMMANDE SYSTÈME DE COMMANDE Actionneurs (servomoteurs, BLDCs) 0 Avion Convertible 1 Radio.flag Estimation d’états Intervention de l’opérateur en cas urgent Radio Trans.flag flag Changement des contrôleurs NON Contrôleur de vol horizontal Trans. flag = 0 θ < 10° OUI NON Accélération OUI Contrôleur de transition Contrôleur de transition Décélération NON OUI θ > 80° OUI Trans. flag = 0 Contrôleur de vol vertical NON NON flag = 0 Contrôleur de décollage NON OUI flag = 1 Contrôleur d’atterrissage OUI