Download
1 / 32
320 likes | 331 Views
This study focuses on the pointing determination for a coherent wind Lidar mission, utilizing the GLAS/ICESat attitude data and proposing a system for analysis. It investigates the requirements and solutions for pointing control and determination in a space-based Doppler wind Lidar system.

E N D
Pointing Determination for a Coherent Wind Lidar Mission J. Marcos Sirota, Christopher Field Sigma Space Corp. Michael Kavaya NASA LaRC January 2006
Outline • Background Information • Wind Lidar Mission Concept • Pointing Determination in GLAS/ICESat • ICESat attitude data • Proposed system for coherent wind lidar • Analysis of pointing control and determination requirements and solutions. • Summary
Orbiting Doppler Wind Lidar at 400 km Second shot: t+100 ms, 768 m, 103 mrad First Aft Shot t + 46 s Return light: t+3.1 ms, 24 m, 3.5 mrad Nadir tilt rate ~ 1mrad/ms 7.7 km/s 90° fore/aft angle in horiz. plane 30° FORE AFT 400 km 467 km 6.1 m (86%) 180 ns (27 m) FWHM (76%) 2 lines LOS wind profiles 1 line “horiz” wind profiles 45° 7.2 km/s 32.1° 120 shots = 12 s = 86 km 233 km 165 km 1/10 s = 722 m 165 km
Earth-Orbiting Doppler Wind Lidar Pointing Geometry - Side View qT = arcsin[(RE + ZL) sinqL/(RE + ZT)] VL RT ZL = 400 km qL = 30 deg. ZT = 4 km (example) qT = 32.1 deg. VL = 7676 m/s RT = 462 km R E = 6371 ±10.7 km qT qL ZL qS ZT qT - qL SPACE R E ATM ATM Lidar Beam Direction EARTH
2 “Horizontal” Wind Lines, 400 km, 30 deg nadirAzimuths = ±45, ± 135 deg 100 km Target Sample Volume Horiz. Resol. 350 km S/C Ground Track 78 km 330 km
4 Horiz Wind Lines 90 deg. 4 115 deg. 2 45 deg 6 1 155 deg. 8 - 25 deg. - 155 deg. 5 7 - 120 deg. - 60 deg. 3 7 LaRC/Kavaya-
l/4 Space-Based Coherent Doppler Wind Lidar System Schematic Transmitter Laser Injection PZT Locking Driver Loop Detector Mirror Power Amplifier Pulsed Laser Oscillator BS Transmitter Beam MM Optics Master Osc. Laser Isolator Telescope, Scanner, and Pointing Determination System 10mm BS Frequency LO Laser Det. Locking Nadir Angle Compensator Nadir Angle Compensator FB Control Signal Beam 2mm Control Local Oscillator Laser Signal BS Polarizing BS Lens 10mm Alignment Mirror 90/10 BS Detector & Pre-Amplifier Control Signal Scan Controller Scan Controller Laser Controller Command Data & Data A/D IF Receiver Management System Recorder Data Transmitter INS/GPS
Orbiting Doppler Wind Lidar at 400 km LOS Wind Measurement Sequence • Aim scanner to next desired direction [pre-shot pointing control, ±2 deg.] • Tune LO laser to remove predicted gross motion and earth rotation [pre-shot pointing knowledge, ±0.2 deg.] • Measure LO laser frequency error and tune electronic mixer to compensate • Fire laser pulse • Keep receiver axis well aligned for 3 ms [Stability A: 6.6 mrad/3 ms] • Optically mix, electronically mix, and digitize backscattered signal • Divide data into time/range/altitude bins [NALT = 22] • Combine shots aimed in same direction, if desired [NACC = 60] [Stability B: ±0.2 deg./12 sec.] • Estimate frequency • Remove residual spacecraft and earth rotation caused frequencies [Final pointing knowledge, ±60 mrad] • Assign time, location, altitude, and direction to each LOS velocity • Repeat above sequence for other desired cross-track distances [NCT = 4] • Repeat above sequence for aft perspectives collocated with fore perspectives [NPER = 2] On Orbit On Orbit Or Ground Processing
Pointing Knowledge, Control, and Stability Requirements • Pre-shot control • to ensure that Doppler shift is within LO laser tuning range • a) ±2 deg. from -ZLV, scanner fore or aft, if ±4000 MHz LO tuning range • b) ±6.7 deg. from -ZLV , scanner fore or aft, if ±4500 MHz LO tuning range • Pre-shot knowledge • to allow LO to be tuned for sufficiently small heterodyne beat frequency • ±0.2 to ±0.5 deg. • affects receiver bandwidth and data quality • Stability, t = 0 to 3 ms, for each shot • 7.1 mrad, 1 s, for budgeted 3 dB 1 s SNR loss • Stability, while staring for shot accumulation (for 0.3 m/s LOS error) • nadir ±0.2 deg., azimuth ±0.3 deg. (beam azimuth at 45 deg. to wind) • up to 30 sec. • Final post-mission knowledge (for 0.3 m/s LOS error) • ±60 mrad = ±0.0034 deg. = ±12 arcsec (scanner azimuth angle at 45 deg. to fore or aft) • Will require use of lidar surface return data for this Shuttle Hitchhiker mission
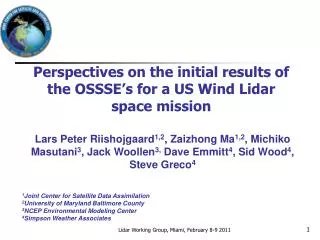
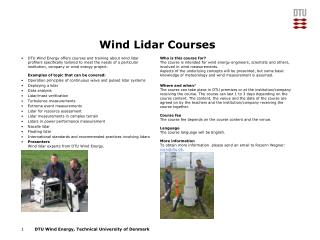
Background Information:ICESat • The Geoscience Laser Altimeter System on ICESat carried the first laser pointing determination system in a Lidar space mission. • It determines the laser pointing direction w.r.t. the stars with an accuracy of 7.5 microradians per axis for every laser shot (40 Hz). • The system includes star and laser imagers, a high precision gyroscope, and cross-reference optical sources.
Geoscience Laser Altimeter System Measurements Surface Altimetry: • Range to ice, land, water, clouds • Uses time of flight of 1064 nm laser pulse • Digitizes transmitted & received 1064-nm pulse waveforms • Laser-beam pointing from star-trackers, laser camera & gyro • 3 cm single shot range resolution • 7 urad angular resolution Atmospheric Lidar: • Laser back-scatter profiles from clouds & aerosols • Uses 1064 nm & 532 nm pulses • 75 m vertical resolution • Analog; photon counting detection • Simultaneous, co-located measurements with altimeter
ICESat Bus • The ICESat bus was selected based on its pointing accuracy and stability. The Ball Global Imaging System 2000 is an imaging-based platform where the attitude control and determination system were designed for accurate pointing control and stability during image acquisition of high resolution Earth scenes from orbit.
Spacecraft motion with Solar Panel Articulation (Case 1) Star Trajectory in LRS 20 urad ~ 1 sec
Spacecraft motion with Solar Panel Articulation (Case 2) Star Trajectory in LRS ~ 200 urad ~ 1 sec
Normal Flight, No Solar Array Articulation s = 1.2 urad
Stellar Reference System in ICESat ICESat II Concept Old system of equal function SRS
l/4 Space-Based Coherent Doppler Wind Lidar System Schematic Transmitter Laser Injection PZT Locking Driver Loop Detector Mirror Power Amplifier Pulsed Laser Oscillator BS Transmitter Beam MM Optics Master Osc. Laser Isolator Telescope, Scanner, and Pointing Determination System 10mm BS Frequency LO Laser Det. Locking Nadir Angle Compensator Nadir Angle Compensator FB Control Signal Beam 2mm Control Local Oscillator Laser Signal BS Polarizing BS Lens 10mm Alignment Mirror 90/10 BS Detector & Pre-Amplifier Control Signal Scan Controller Scan Controller Laser Controller Command Data & Data A/D IF Receiver Management System Recorder Data Transmitter INS/GPS
Pointing determination system concept forWind Lidar Mission Lateral Transfer Retroreflector Laser Camera /Star Tracker Transceiver Telescope Counter-rotating Ring Frame Motor with Absolute Encoder Silicon Wedge
Star Tracker Errors Per Axis • Single frame errors for HD-1003 (example) - 2 arcsec (1s) pitch and yaw (ST coordinates) - 40 arcsec (1s) roll • If at 45 degree to Nadir it translates to: ~ 30 arcsec per axis per frame • Filtered solution (Star tracker plus Inertial Reference Unit) shall yield about 3 arcsec per axis (1s).
Stability analysis Requirement • Stability of ICESat-class spacecraft is adequate for round-trip per shot requirement • Orbital motion compensation with aft-optics mirror is necessary for multi-shot integration
Requirement Compliance Analysis • 1. How will we have pre-shot pointing control? To ensure that the gross Doppler (spacecraft and earth motions) is within the tuning range of the tunable LO laser. (+/- 2-7 degrees) a. Spacecraft slew rates for ICESat-class bus have demonstrated this level of pointing control. b. Fine pointing can be achieved with the aft-optics beam steering mechanism.
Requirement Compliance Analysis • 2. How will we have pre-shot pointing knowledge? To allow the setting of the tunable LO frequency so that the return signal is within the bandwidth of the detector and electronics. (+/- 0.2 degrees, or ~ 3.5 mrad) • Pointing knowledge will be obtained from the Laser Sensor, Attitude Determination System, and Scanner Encoder to within 20 urad per axis.
Requirement Compliance Analysis • 3. How will we hold the line of sight of the receiver stable while waiting for the laser light to return from the earth? To avoid more SNR lossthan is budgeted. (8 microradians 1 sigma over 7 ms). • The stability of the spacecraft is sufficient to comply with this requirement. If we wish to compensate for the 3.1 urad from orbital motion then a fixed-angle wedge or tilt mirror can be introduced on the path between fire and return.
Requirement Compliance Analysis • 4. How will we hold the line of sight stable while we are accumulating several shots to make one wind measurement? To avoid smearing the angle at which we probe the atmosphere which will add error to the wind estimate. (+/- 0.2 degrees over 12 seconds). • The Nadir Compensation Mechanism will provide compensation form shot to shot, holding the line of sight stable until the end of integration.
Requirement Compliance Analysis • 5. How will we achieve the final pointing knowledge for each shot? To allow minimum error in reporting the measured wind's direction to the user. (+/- 60 microradians assuming earth surface is not available to use for reference). • The Laser Reference Sensor plus the Scanner Encoder shall provide knowledge for every shot fired w.r.t the stars to better than 20 urad per axis.
Summary • Pointing requirements for a space based coherent wind lidar mission can be met with space proven technology, and some current miniaturization efforts. • Same design could be used to adapt the system to various platforms, i.e dedicated craft or multi-instrument (NPOESS).