Download
1 / 26
260 likes | 265 Views
This paper presents the Latent Space Model (LSM) for Road Networks, a predictive technique using latent spaces to model and predict time-varying traffic on road networks. The LSM-RN approach leverages iterative multiplicative methods and non-negative matrix factorization to efficiently predict traffic flows. Experimental results on a large-scale sensor network in Los Angeles demonstrate the scalability and effectiveness of the proposed model.

E N D
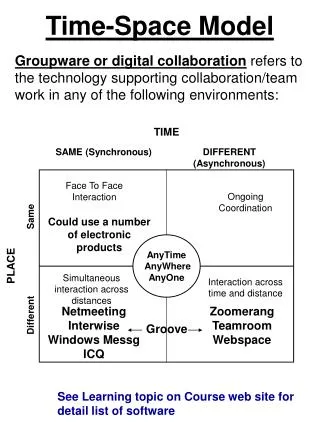
Latent Space Model for Road Networks to Predict Time-Varying Traffic Presented by: Rob Fitzgerald Spring 2017
Definition of “Latent” https://en.oxforddictionaries.com/definition/latent
Latent Space Model? Is this what they were referring to?
Introduction • The traffic prediction problem aims to find the future link flows based on historical flow data and some observations of the current network state • Applications include traffic warning systems, route guidance systems, emergency planning systems, and network design • Online applications require fast and correct solutions
Introduction • Traffic prediction solutions require many iterations over massive networks • Flows are not independent • Driver behavior is very difficult to model
Introduction • Can we take a predictive technique which has been successfully applied to social media, and apply it to the traffic prediction problem? • Can we produce a solution to traffic prediction which is less computationally demanding than leading techniques such as HMM and SGD?
Latent Space Model Latent Models find emergent “topics” that associate observations Social networks • Find consumer trends • Track disease transmission • Sentiment analysis
Latent Space Model Paper proposes Latent Space Modeling for Road Networks (LSM-RN) • Group vertices of a road network graph • Match pairs of vertices which are similar • Traffic behavior • Road network topology • Embed matched pair in a latent space • Use these latent spaces to make traffic prediction
Latent Space Model Differences between social networks and road networks • Spatial and temporal correlations between neighbors on road networks are not present in social networks • Road networks are fast to evolve as traffic conditions vary on a short time scale; people in social networks tend to evolve smoothly • Road networks require dynamic updates to the network links, whereas social network links are relatively static • We have relatively instantaneous validation of our prediction in road networks - short time between prediction and the ground truth
Latent Space Model LSM-RN avoids pure “global learning” • Iterative multiplicative methods for model convergence • “Not practical” for real-time traffic prediction LSM-RN has “incremental online learning” approach • Feedback-based • Instead of a single vertex update per round, multiple vertices can be predicted … and leverages both global and incremental • Balance between accuracy and efficiency • Long-term global learning batches • Short-term incremental learning
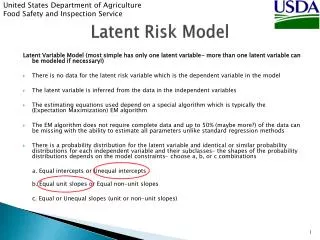
Latent Space Model Road Networks have • Sparse data • Strongly correlated vertices - temporal and spatial • The need to model time variance LSM-RN uses Non-negative Matrix Factorization (NMF) for latent space learning • Traditional global multiplicative algorithm • Topology-aware incremental algorithm • Updates vertices with topology constraints • Based on adjacency matrix graph representation
Latent Space Model Loss function only defined on edges with observed readings Sparse network data results in missing values • LSM-RN applies a graph Laplacian constraint for “smoothing” • Defined as L = D - W where • W is a graph proximity matrix • D is a diagonal matrix Traffic model with Laplacian constraint:
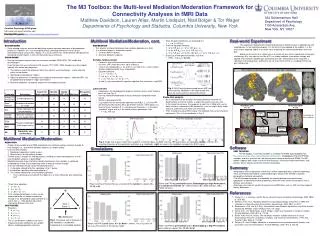
Experimental Results Experiments on loop sensor network (15,000 sensors, 3420 miles) From March and April 2014 - 60 million records “LARGE” and “SMALL” subgraphs of Los Angeles
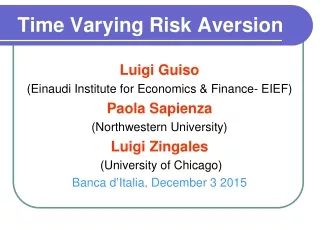
Experimental Results Scalability
Experimental Results Additional Experiments • Effect of varying algorithm parameters and discussion • Convergence rate