Download
1 / 1
10 likes | 210 Views
Hongwei Zhang , Xiaohui Liu , Chuan Li , Yu Chen , Xin Che , Feng Lin*, Le Yi Wang * , George Yin Department of Computer Science, Wayne State University, Detroit, Michigan, {hongwei,xiaohui,chuan,yu_chen}@wayne.edu

E N D
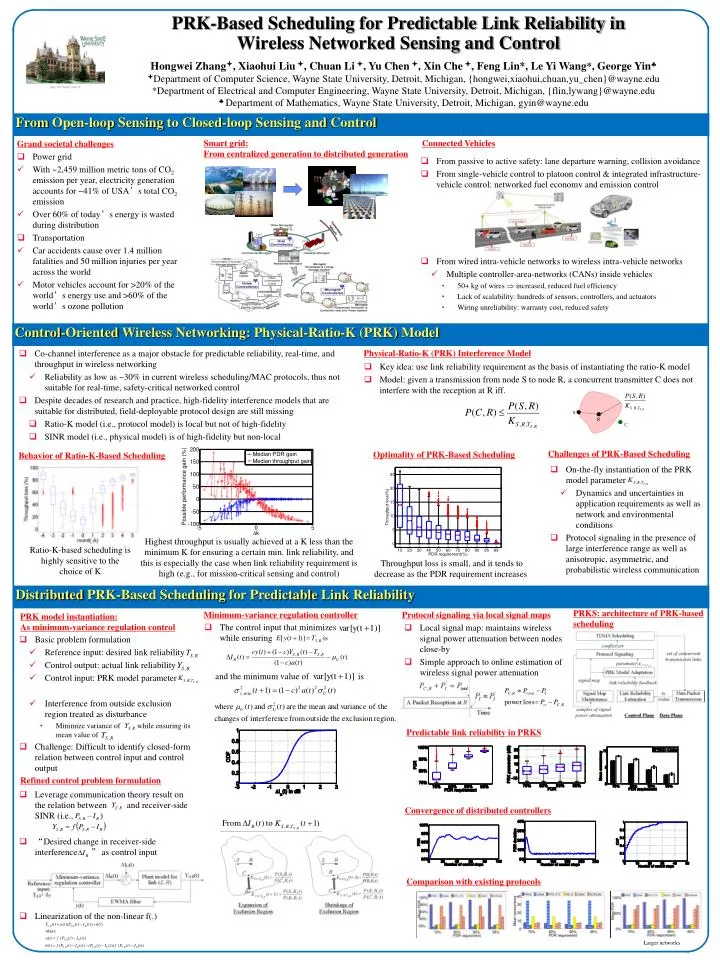
Hongwei Zhang, Xiaohui Liu , Chuan Li , Yu Chen , Xin Che , Feng Lin*, Le Yi Wang*, George Yin Department of Computer Science, Wayne State University, Detroit, Michigan, {hongwei,xiaohui,chuan,yu_chen}@wayne.edu *Department of Electrical and Computer Engineering, Wayne State University, Detroit, Michigan, {flin,lywang}@wayne.edu Department of Mathematics, Wayne State University, Detroit, Michigan, gyin@wayne.edu PRK-Based Scheduling for Predictable Link Reliability in Wireless Networked Sensing and Control From Open-loop Sensing to Closed-loop Sensing and Control Smart grid: From centralized generation to distributed generation Connected Vehicles Grand societal challenges • Power grid • With ~2,459 million metric tons of CO2 emission per year, electricity generation accounts for ~41% of USA’s total CO2 emission • Over 60% of today’s energy is wasted during distribution • Transportation • Car accidents cause over 1.4 million fatalities and 50 million injuries per year across the world • Motor vehicles account for >20% of the world’s energy use and >60% of the world’s ozone pollution • From passive to active safety: lane departure warning, collision avoidance • From single-vehicle control to platoon control & integrated infrastructure-vehicle control: networked fuel economy and emission control • From wired intra-vehicle networks to wireless intra-vehicle networks • Multiple controller-area-networks (CANs) inside vehicles • 50+ kg of wires increased, reduced fuel efficiency • Lack of scalability: hundreds of sensors, controllers, and actuators • Wiring unreliability: warranty cost, reduced safety Control-Oriented Wireless Networking: Physical-Ratio-K (PRK) Model • Co-channel interference as a major obstacle for predictable reliability, real-time, and throughput in wireless networking • Reliability as low as ~30% in current wireless scheduling/MAC protocols, thus not suitable for real-time, safety-critical networked control • Despite decades of research and practice, high-fidelity interference models that are suitable for distributed, field-deployable protocol design are still missing • Ratio-K model (i.e., protocol model) is local but not of high-fidelity • SINR model (i.e., physical model) is of high-fidelity but non-local Physical-Ratio-K (PRK) Interference Model • Key idea: use link reliability requirement as the basis of instantiating the ratio-K model • Model: given a transmission from node S to node R, a concurrent transmitter C does not interfere with the reception at R iff. S R C Challenges of PRK-Based Scheduling Optimality of PRK-Based Scheduling Behavior of Ratio-K-Based Scheduling • On-the-fly instantiation of the PRK model parameter • Dynamics and uncertainties in application requirements as well as network and environmental conditions • Protocol signaling in the presence of large interference range as well as anisotropic, asymmetric, and probabilistic wireless communication Highest throughput is usually achieved at a K less than the minimum K for ensuring a certain min. link reliability, and this is especially the case when link reliability requirement is high (e.g., for mission-critical sensing and control) Ratio-K-based scheduling is highly sensitive to the choice of K Throughput loss is small, and it tends to decrease as the PDR requirement increases Distributed PRK-Based Scheduling for Predictable Link Reliability PRKS: architecture of PRK-based scheduling Minimum-variance regulation controller Protocol signaling via local signal maps PRK model instantiation: As minimum-variance regulation control • The control input that minimizes while ensuring and the minimum value of is • Local signal map: maintains wireless signal power attenuation between nodes close-by • Simple approach to online estimation of wireless signal power attenuation • Basic problem formulation • Reference input: desired link reliability • Control output: actual link reliability • Control input: PRK model parameter • Interference from outside exclusion region treated as disturbance • Minimize variance of while ensuring its mean value of • Challenge: Difficult to identify closed-form relation between control input and control output Predictable link reliability in PRKS Refined control problem formulation • Leverage communication theory result on the relation between and receiver-side SINR (i.e., ) • “Desired change in receiver-side interference ” as control input • Linearization of the non-linear f(.) Convergence of distributed controllers Comparison with existing protocols Larger networks