Download
1 / 7
70 likes | 176 Views
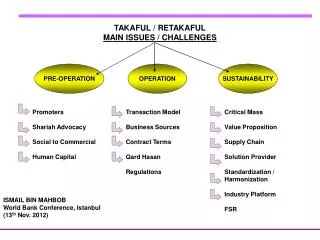
By Joseph Repa. Robot Operation. Overview:. flipping arm sweeper bar lift system Drive system Program. flipping arm.

E N D
By Joseph Repa Robot Operation
Overview: • flipping arm • sweeper bar • lift system • Drive system • Program
flipping arm • our robot was built to fit the maximum dimensions 10 in. as the height with 12 in as the length and 8 as the with. This was to maximize the amount of space and how many balls we could pick up.
sweeper bar • much like the beater bar of a vacuum, was used to push the golf balls up a ramp and into the basket.
lift system • attached to the basket to dump the golf balls this was comprised of two scissor lifts one on both sides of the robot. The mechanism was raised by rubber band compression causing the arms of the scissor lift to come together. Thus, raising the basket to the correct dumping height.
Drive system • Drive system and chassis was comprised of two caster wheels in the front and two hub wheels with rubber tires in the back. The hub wheels were connected to motors to control the directional movement of the robot.
Program • Push button start, drive forward, pick up two balls, turn around, back up, and dump.