Download
1 / 33
330 likes | 519 Views
Entropy, Information and Compressive Sensing in the Quantum Domain. John Howell Greg Howland James Schneeloch Daniel Lum Sam Knarr Clemente Cuevas(REU) Matt Ware (REU). Robert Boyd Cliff Chan Petros Zerom. Outline. Introduction to compressive sensing Shannon entropy Nyquist sampling

E N D
Entropy, Information and Compressive Sensing in the Quantum Domain. John Howell Greg Howland James Schneeloch Daniel Lum Sam Knarr Clemente Cuevas(REU) Matt Ware (REU) Robert Boyd Cliff Chan Petros Zerom
Outline • Introduction to compressive sensing • Shannon entropy • Nyquist sampling • Lossy compression • K-sparse sensing • L1 norm reconstruction • Advantages • Applications • Ghost imaging with entangled photons • Photon counting Lidar • Depth Maps • Object tracking • High dimensional entanglement characterization
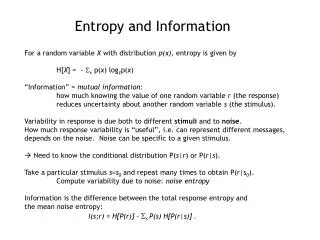
Entropy Measure uncertainty of random variable X with distribution p(x). Find number of symbols and bits per symbol (e.g., 0 or 1 binary) Compression removes intersymbol correlations Example (alphanumeric) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ R _ _ E _ _ _ _ _ Q _ _ _ R _ _ E _ T _ _ _ Q S T A R T M E E T _ N G Shannon showed there are approximately 1 bit per symbol in English language Shannon Entropy
Information Theorist Marriage Therapist “I see that your channel capacity is quite low. You need to spend more time maximizing your mutual information. Please increase the entropy of your communication while minimizing the noise in your classical channels.”
Shannon Entropy for Images: Compression After Sensing • Compression removes interpixel correlations • Decompose in decorrelated transform basis • k-sparse representation • DCT, DFT, wavelets etc. • Significant reduction in memory requirements, reduced uncertainty
Standard Sensing Paradigm (e.g., jpeg) • Sample (at least two times above Nyquist) • Transform to sparse basis • Preferentially attenuate high frequency components • Round coefficients • Inverse transform
Sensing Paradigms Typical Sensing: Compress after you sense Compressed sensing: Compress while you sense
CS Literature of Interest • Tutorials on CS • R.G. Baraniuk, IEEE SIGNAL PROCESSING MAGAZINE [118] JULY 2007 • E.J. Candes and M.J. Wakin, IEEE SIGNAL PROCESSING MAGAZINE [21] MARCH 2008 • Single Pixel Camera • Duarte et al, IEEE SIGNAL PROCESSING MAGAZINE [83] MARCH 2008
Introduction to CS Consider a 1 dimensional signal x of length N and a transform basis s. Transform matrix of dimension NxN We require a sensing matrix F which is not sparse when transformed (incoherence or restricted isometry property). Random, length N, sensing matrices satisfy this requirement.
Introduction to CS M random measurements needed to recover signal Reconstruct image using l1 norm minimization We use Gradient Projection for Sparse Reconstruction algorithm (noise tolerant BPDN) Figueiredo et al, IEEE Selected Topics in Signal Processing, 2007
Compressive sensing Reflected light Scene Photodiode DMD
Compressive sensing We take M << N measurements with different random DMD patterns and then reconstruct x Outside information is needed to solve our underdetermined linear system to reconstruct our image!
Why CS? • Sampling rate • Above information rate • NOT above Nyquist rate. • Resource efficient • Single pixel measurements • Fewer measurements • Automatically finds large k-sparse coefficients
Cool stuff recently done • “Compressive Sensing Hyperspectral Image” T. Sun and K. Kelly (COSI) (2009) • “Sparsity-based single-shot sub-wavelength coherent diffractive imagin” A. Szameit et al (M. Segev), Nature Materials 11, 455 (2012) • “Compressive Depth Map Acquisition Using a Single Photon-Counting Detector” A. Colaco et al Proc. IEEE Conf. Computer Vision and Pattern Recognition (2012) • “Compressive Sensing for Background Subtraction” Volkan Cevher, (Baraniuk) • 3D COMPUTATIONAL IMAGING WITH SINGLE-PIXEL DETECTORS (Padgett) Science 340, 844 (2013)
Some of our applications • Ghost imaging with entangled photons • Photon counting Lidar • Depth Maps • Object tracking • High dimensional entanglement characterization
Compressive Sensing 4500 measurements N=128x128 pixels 9 seconds/measurement SNR 8 Acquisition time 4500 x 9s~ ½ day Raster Scanning For same SNR and resolution it would take almost 3 years to acquire image with same flux Comparison to Raster Scanning
LIDAR with JIGSAW • Pros • 32x32 APD detectors • Time of Flight Measurements • High Signal to Noise (no amplification noise) • Foliage Penetrating, Aerosol • Low Light Level Detection • Cons • Low Fill Factor • Difficult to Scale • Expensive • Resource Heavy • Visible Wavelengths • Large Payload MIT LL
Experimental Setup G. Howland, P.B. Dixon and J.C. Howell, Appl. Optics 50, 5917 (2011)
Results: 3D Imaging Wall U R
2nd-Order Correlations Slow Method • >7 bits mutual information in X and P • P. Ben Dixon et al PRL 108, 143603 (2012)
With CS • Replace Raster with CS • N log N scaling rather than N3 to N4. • 8 hours instead of a year Efficient High-Dimensional Entanglement Imaging with a Compressive-Sensing Double-Pixel Camera Gregory A. Howland and John C. Howell Phys. Rev. X 3, 011013 (2013).
Mutual Information in X and P Violation of Continuous-Variable Einstein-Podolsky-Rosen Steering with Discrete MeasurementsJ. Schneeloch, P. Ben Dixon, G. A. Howland, C. J. Broadbent, and J. C. Howell Phys. Rev. Lett. 110, 130407 (2013).
Background Subtraction Object Tracking Compressive object tracking using entangled photons Omar S. Magana-Loaiza, Gregory A. Howland, Mehul Malik, John C. Howell, and Robert W. Boyd Appl. Phys. Lett. 102 231104 (2013).
Novel Acquisition Paradigm • Quantum imaging • Entanglement mutual information • Low flux LIDAR • Precision measurements • Real-time video