Download
1 / 49
560 likes | 1.12k Views
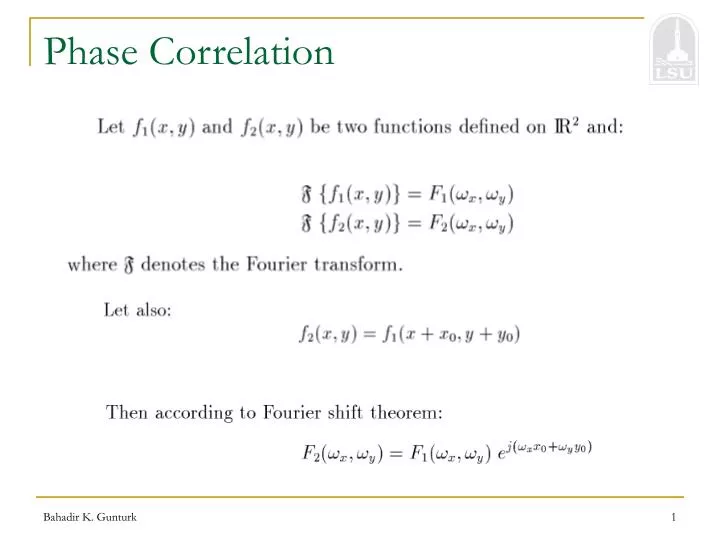
Phase Correlation. Phase Correlation. Take cross correlation. Take inverse Fourier transform. Location of the impulse function gives the translation amount between the images. Phase Correlation. Computer Vision . Stereo Vision. Coordinate Systems.

E N D
Phase Correlation Take cross correlation Take inverse Fourier transform Location of the impulse function gives the translation amount between the images
Computer Vision Stereo Vision
Coordinate Systems • Let O be the origin of a 3D coordinate system spanned by the unit vectors i, j, and k orthogonal to each other. i P O k j Coordinate vector
Homogeneous Coordinates n H P O Homogeneous coordinates
Coordinate System Changes • Translation
Coordinate System Changes • Rotation where Exercise: Write the rotation matrix for a 2D coordinate system.
Coordinate System Changes • Rotation + Translation
Perspective Projection • Perspective projection equations
3D World Points • Camera Centers • Image Points Multi-View Geometry Relates • Camera Orientations • Camera Parameters
Stereo scene point p p’ image plane optical center
Three Questions • Correspondence geometry: Given an image point p in the first view, how does this constrain the position of the corresponding point p’ in the second? • Camera geometry (motion): Given a set of corresponding image points {pi ↔ p’i}, i=1,…,n, what are the cameras C and C’ for the two views? Or what is the geometric transformation between the views? • Scene geometry (structure): Given corresponding image points pi ↔ p’i and cameras C, C’, what is the position of the point X in space?
Epipolar Line p’ Y2 X2 Z2 O2 Epipole Stereo Constraints M Image plane Y1 p O1 Z1 X1 Focal plane
P p p’ O’ O From Geometry to Algebra All vectors shown lie on the same plane.
P p p’ O’ O From Geometry to Algebra
Matrix form of cross product a=axi+ayj+azk a×b=|a||b|sin(η)u b=bxi+byj+bzk
The Essential Matrix Essential matrix
Stereo Vision • Two cameras. • Known camera positions. • Recover depth.
Recovering Depth Information P Q P’1 P’2=Q’2 Q’1 O2 O1 Depth can be recovered with two images and triangulation.
disparity Depth Z Elevation Zw A Simple Stereo System LEFT CAMERA RIGHT CAMERA baseline Right image: target Left image: reference Zw=0
Stereo View Right View Left View Disparity
Stereo Disparity • The separation between two matching objects is called the stereo disparity.
Parallel Cameras P Z xl xr f pl pr Ol Or Disparity: T T is the stereo baseline
(xl, yl) Correlation Approach LEFT IMAGE • For Each point (xl, yl) in the left image, define a window centered at the point
Correlation Approach RIGHT IMAGE (xl, yl) • … search its corresponding point within a search region in the right image
Correlation Approach RIGHT IMAGE (xr, yr) dx (xl, yl) • … the disparity (dx, dy) is the displacement when the correlation is maximum
epipolar line epipolar line epipolar plane Stereo correspondence • Epipolar Constraint • Reduces correspondence problem to 1D search along epipolar lines
For each epipolar line For each pixel in the left image Of course, matching single pixels won’t work; so, we match regions around pixels. Stereo correspondence • Compare with every pixel on same epipolar line in right image • Pick pixel with the minimum matching error
? = g f Most popular Comparing Windows For each window, match to closest window on epipolar line in other image.
Comparing Windows Minimize Sum of Squared Differences Maximize Cross correlation
Feature-based correspondence • Features most commonly used: • Corners • Similarity measured in terms of: • surrounding gray values (SSD, Cross-correlation) • location • Edges, Lines • Similarity measured in terms of: • orientation • contrast • coordinates of edge or line’s midpoint • length of line
line corner structure Feature-based Approach LEFT IMAGE • For each feature in the left image…
line corner structure Feature-based Approach RIGHT IMAGE • Search in the right image… the disparity (dx, dy) is the displacement when the similarity measure is maximum
Correspondence Difficulties • Why is the correspondence problem difficult? • Some points in each image will have no corresponding points in the other image. (1) the cameras might have different fields of view. (2) due to occlusion. • A stereo system must be able to determine the image parts that should not be matched.
Structured Light • Structured lighting • Feature-based methods are not applicable when the objects have smooth surfaces (i.e., sparse disparity maps make surface reconstruction difficult). • Patterns of light are projected onto the surface of objects, creating interesting points even in regions which would be otherwise smooth. • Finding and matching such points is simplified by knowing the geometry of the projected patterns.
Stereo results • Data from University of Tsukuba Scene Ground truth (Seitz)
Results with window correlation Estimated depth of field (a fixed-size window) Ground truth (Seitz)
Results with better method • A state of the art method • Boykov et al., Fast Approximate Energy Minimization via Graph Cuts, • International Conference on Computer Vision, September 1999. Ground truth (Seitz)
W = 3 W = 20 Window size • Effect of window size • Better results with adaptive window • T. Kanade and M. Okutomi,A Stereo Matching Algorithm with an Adaptive Window: Theory and Experiment,, Proc. International Conference on Robotics and Automation, 1991. • D. Scharstein and R. Szeliski. Stereo matching with nonlinear diffusion. International Journal of Computer Vision, 28(2):155-174, July 1998 (Seitz)
Other constraints • It is possible to put some constraints. • For example: smoothness. (Disparity usually doesn’t change too quickly.)
P Pl Pr Yr p p r l Yl Xl Zl Zr fl fr Ol Or R, T Xr Parameters of a Stereo System • Intrinsic Parameters • Characterize the transformation from camera to pixel coordinate systems of each camera • Focal length, image center, aspect ratio • Extrinsic parameters • Describe the relative position and orientation of the two cameras • Rotation matrix R and translation vector T
Applications First-down line courtesy of Sportvision
Applications Virtual advertising courtesy of Princeton Video Image