Download
1 / 20
200 likes | 244 Views
Explore the optimization of constructing Steiner trees using spanning graphs, including heuristic approaches, point-edge connections, and cycle analysis. Learn about the Rectilinear Steiner tree design and efficient algorithms for VLSI design.

E N D
Efficient Steiner Tree Construction Based on Spanning Graphs Hai Zhou Electrical and Computer Engineering Northwestern University
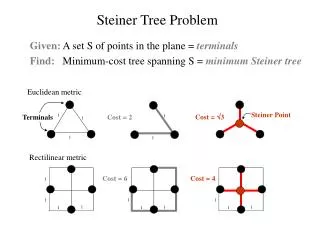
Rectilinear Steiner tree Steiner points • NP-hard • but efficient heuristic are critical in modern VLSI design
Spanning tree as a starting point • L(MST) <= 1.5L(SMT) • Shorten tree length by modification
e Edge-based approach • Borah, Owens, and Irwin (TCAD 94) p e’
Questions • How to construct the initial spanning tree? • How to find the edge point pair candidates for connection? • How to find the longest edge on the formed cycle?
Answer: spanning graphs • A graph on a set of given points • A MST on the graph is a MST of the given points • geometrical MST = spanning graph + graph MST • Spanning graph also represent geometrical proximity information • it also provides candidates for point-edge connection • It is a sparse graph: O(n) number of edges
Spanning graphs in O(n log n) time Euclidean rectilinear Delaunay Non-Delaunay Delaunay div.&con. (Guibas et al 83) divide&conquer (Shamos 78?) div.&con. (Hwang 79) sweep-line (Zhou et al 01) sweep-line (Shute et al 91) sweep-line (Fortune 87)
Octal partition • ||pq||<max(||ps||, ||qs||) • Only the closest point in each region needs to be connected to s R1 p R8 R1 q R7 R2 s R6 R3 R5 R4 s
Find closest points in R1 • Sweep points in increase x+y • Keep points waiting for closest point in A (active set) • Checking current point with A • make connections • delete connected points • add current point in A 4 2 3 1 x+y
Active set • Active set can be linearly order according to x • Use a binary search tree • Finding insertion place O(log n) • Deleting each point O(log n) • Inserting a point O(log n) • Each point is inserted and deleted at most once: O(n log n)
Spanning graph for point-edge candidates • (p,a) or (p,b) is usually in the spanning graph if nothing blocks p from (a,b) a e p b
Finding longest edge on cycle • Use Tarjan’s least common ancestor algorithm • Almost linear time • The bug appeared in Borah’s original O(n2) algorithm does not exist here (proved)
Algorithm RST • construct a rectilinear spanning graph • sort the edges in the graph • use Kruskal to build MST, at the same time • build the merging binary tree and • possible point-edge candidates (by spanning graph) • use least common ancestors on merging binary tree to find the longest edges in cycles • iteratively update point-edge connections
Correction • The running times of RST reported in the paper are much worse because we accidentally switched the sorting method to bubble sort (O(n2)) instead of quick sort
BGA • Mandoiu et al. (ASP-DAC 03) • Similar to Borah et al. but more general • O(nlog2n) e e’
Compared with BGA Trees by RST less than 1% longer lengths
Summary • Besides generating spanning trees, spanning graphs also provide proximity information • Use for Steiner tree improvements • RST: efficient O(nlog n) heuristic • Future research: improving tree lengths