Download
1 / 23
230 likes | 415 Views
Geosat Follow-On GDR Status. Navy/NOAA Altimetry Meeting Stennis Space Center April 9, 2002 John Lillibridge NOAA Laboratory for Satellite Altimetry Remko Scharroo Technische Universiteit Delft Visiting Scientist - NOAA/LSA. CPU Resets & Data Return. Launch - February, 1998

E N D
Geosat Follow-On GDR Status Navy/NOAA Altimetry Meeting Stennis Space Center April 9, 2002 John Lillibridge NOAA Laboratory for Satellite Altimetry Remko Scharroo Technische Universiteit Delft Visiting Scientist - NOAA/LSA
CPU Resets & Data Return • Launch - February, 1998 • Time Tag Unit - June, 1999 • CPU Resets Fixed - November, 1999 • Navy Acceptance - November, 2000 • GDR Data Release - Dec.’99 - March ‘02
GDR Status Discussion • NOAA GDR / NAVO NGDR Differences • Model Upgrades in NOAA GDR • Timing Issues • Recent open issues: Attitude & SWH
NOAA GDR NAVY NGDR PASS_BEGIN_TIME = 518075662.370426; EQ_CROSSING_TIME_LON = 518077173.055207 1.011439; CYCLE_NUMBER = 67; PASS_NUMBER = 1; PROCESSING_TIME = Thu Mar 7 16:49:26 2002; PROCESSING_CENTER = NOAA LSA; SOFTWARE_VERSION = 1.10; SATELLITE_ID = GFO; DATA_RECORD_LENGTH = 184; BASIC_GDR_LENGTH = 98; HEIGHT_CALIBRATION_BIAS = .0; ALTITUDE_BIAS_INITIAL = .020815; ALTITUDE_BIAS_CENTER_OF_GRAVITY = 292.0; TIMING_BIAS_INITIAL = -.049001; AGC_CALIBRATION_BIAS = -.37; AGC_BIAS_INITIAL = 31.86; ORBIT = poe z10601; PASS_END_TIME = 518078675.628780; NUMBER_GDR_RECORDS = 2336; END_OF_HEADER PASS_BEGIN_TIME = 0.39182900; REVOLUTION_NUMBER = 2147483647; CYCLE_NUMBER = 2147483647; PASS_NUMBER = 2147483647; PROCESSING_TIME = 6302.58452546; PROCESSING_CENTER = NAVO ADFC IGDR Testing; SOFTWARE_VERSION = Software Version = 0.1; SATELLITE_ID = GFO; DATA_RECORD_LENGTH = 184; BASIC_GDR_LENGTH = 98; HEIGHT_CALIBRATION_BIAS = 0.000000; ALTITUDE_BIAS_INITIAL = 0.020815; ALTITUDE_BIAS_CENTER_OF_GRAVITY = 292.000000; SWH_BIAS_INITIAL = 0.000000; AGC_CALIBRATION_BIAS = -0.370000; AGC_BIAS_INITIAL = 31.860000; ORB=MOESLR TID=FES95.2 ION=GIM_FL DRY=NOGAPS WET=WVR; Second comment; Third comment; END_OF_HEADER GDR/NGDR Header Diffs • Cycle & Pass vs. Daily File • Pass Begin & End Times in 1985 seconds • Equator Crossing Time & Longitude • Processing Time as Unix Time Stamp • Initial Timing Bias vs. Initial SWH Bias (always zero) • Orbit Ephemeris Type (moe/poe) & Arc Filename • Number of Records in Pass File
GDR/NGDR Data Diffs • Data Field Redefinitions • #32: Net Time Tag Correction -> dDt (USO) • #33: Attitude -> Attitude2 (Clipping) • #35: Flags-2 -> NCEP Wet Tropo • #74-76: Q1,Q2,RT -> RT,Q1,Q2 (byte-alignment) • Model & Correction Upgrades • POE Laser Orbits from NASA Goddard • NCEP Reanalysis Wet & Dry Tropo • Inverse Barometer: Local - Global Ocean Mean • CODE Global Ionosphere Model • GOT00.2 Ocean & Load Tides • GSFC00.1 Mean Sea Surface & EGM96 Geoid • ETOPO2 Two-Minute Bathymetry/Topography • Two-Minute Land/Sea/Inland Water LandMask (2 bits)
ETOPO2 Bathymetry/Topography • GLOBE Topography • Sandwell & Smith Predicted Bathymetry • 2-minute Resolution
GMT Landmask • Ocean/Non-Ocean + Wet/Dry Mask Bits • Based on GMT Full-Resolution Coastline • Two-Minute Grid
Global Inverse Barometer • Local IB[mm]: –9.948 * (SLP - 1013.3 [mbar]) • Global IB: Ocean mean SLP vs. 1013.3 • NCEP Reanalysis 2.5°, 6-hourly grids • Two-day Smoothing • Interpolate IB vs. Dry to avoid quantization errors
CODE Ionosphere Model • GPS based Global Ionosphere Model • Presently still near peak in solar activity • Operational TEC grids via mirror scripts
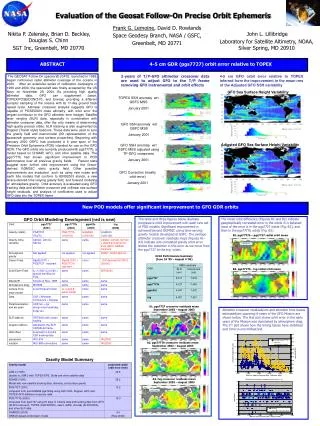
GFO & T/P Sea Surface Height • SSH-MSS residuals: 11 cm for GFO; 10 cm for T/P • Geocenter offsets applied (B. Beckley/GSFC)
Greenland Heights vs. ETOPO2 • Deviations relative to Geoid+Topography • -40 meter interior offset • Compare with DTM2000 • No waveform retracking
Timing Issues • Ultra-Stable Oscillator Drift • Time-Tagging Stability (1 Hz) • Orbit/Range Timing Biases “ In Altimetry, Timing is Everything” Penn State, August 1997
Ultra-Stable Oscillator Drift dƒ/ƒ ~ dDt/Dt ~ dh/h ~ 10-7 (0.1 ppm) Doppler Frequency ƒ: 400 MHz dƒ: 40 Hz Record SpacingDt: 0.98 sec dDt: 0.1 msec Range Correction h: 800 km dh: 8 cm
USO Drift Height Correction Bad “ratio” in SDR
Battery Reconditioning USO Drift since Dec.’99
Attitude Adjustment • Mean Off-Nadir angle ~ 0.24° until March’02 • Attitude ~ 0.08° now • Current SDR algorithm “clips” Attitude2
Frequency (%) SWH (m) SWH After Attitude Change
Gate Index 1 Gate Index 2 Gate Index 3 Gate Index 4 Millions of 10-Hz Values SWH(m) SWH Histogram - Gate Index DSWH(ATT,SWH) = k[gate_index]*(VATT-b0)
GFO GDR Data Release • Poised to release 50 cycles: Dec ‘99 - March ‘02 • State of the Art Corrections • Attitude2 issue resolved DSWH “k” values still open • 10 cm SSH Variability -Excellent Data Quality • Agile tracker recovers data over land/lake/ice