Download
1 / 24
240 likes | 446 Views
سمينار درس رباتيكز. به نام خدا. موضوع : معماري Subsumption. ارائه دهنده : حسام عمرانپور 85131071 زمستان 85. فهرست مطالب:. مدل سنتي معماري معماري رفتارگرا معماري subsumption اهداف اصلی این تئوری مدل معماري AFSM ارائه يك مثال مزايا و معايب نتيجه گيري. 22/1. مدل سنتي معماري.

E N D
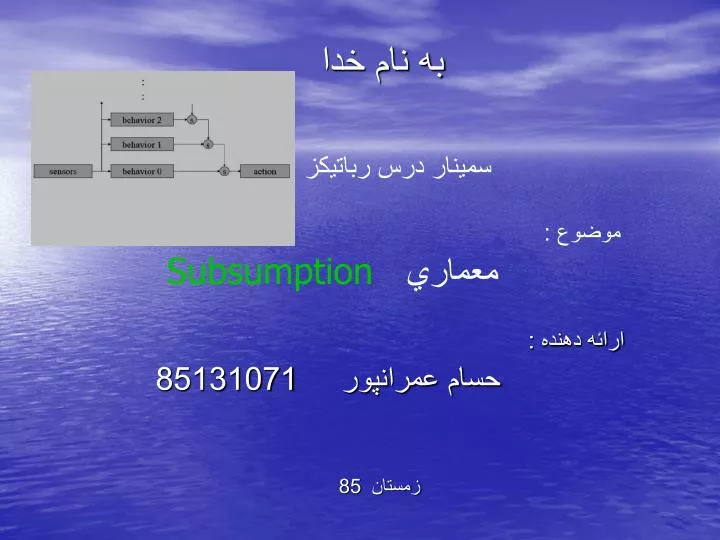
سمينار درس رباتيكز به نام خدا موضوع : معماريSubsumption ارائه دهنده : حسام عمرانپور 85131071 زمستان 85
فهرست مطالب: • مدل سنتي معماري • معماري رفتارگرا • معماري subsumption • اهداف اصلی این تئوری • مدل معماري • AFSM • ارائه يك مثال • مزايا و معايب • نتيجه گيري 22/1
مدل سنتي معماري • شكستن يك عمل به 5 زيرعمل • ورودي از يك طرف – عمل از طرف ديگر 22/2
مدل سنتي معماري • Perception : حسگر متصل به ربا ت • Modeling : ورودی سنسورها را به یک وضعیت داخلی ربا ت مدل می کند • Planning: از مکان جاری برای رسیدن به هدف برنامه ریزی می کند • Task execution : plan را به دستورا ت حرکتی تبدیل می کند • Motor control : باعث می شود دستورات اجرا شوند این روش تجزیه با توجه به شواهد که از زیست شناسی و تکامل بدست آمده مناسب نیست به محض اینکه پیچیدگی محیط افزایش می یابد زمان لازم برای درک و مشاهده و مدل کردن و... به طور نمایی افزایش می یابد 22/3
معماري رفتارگرا • از دید رفتار شناسان هوشمندی نتیجه رفتار است • به جای اینکه به اجزاء سازنده سیستم نگاه کنیم به رفتار آن نگاه می کنیم • معماری رفتار گرا ازمدل دنیای سمبولیک و منطق سمبولیک استفاده نمی کند • row sensor date : نمایش اطلاعات به اطلاعات دریافتی از سنسورها نزدیک است و به صورت سمبولیک نیست. • task decomposition : ترکیبی از قسمت های خود مختار که هر کدام به تنهای مسئول انجام یک task هستند. 22/4
معماري subsumption • مدلي از معماري رفتار گرا • این روش توسط Rodeny A.Brooks در سال 1980برای ساختن ربات های متحرک • مسائل مر بوط به رفتار پیچیده را با ساختار کنترلی سادهحل مي كند • سعي شده همانند طبیعت سیر تکاملی را دنبال کند 22/5
اهداف اصلی این تئوری : • اهداف چندگانه : ربات اهداف چند گانه ای دارد در حالیکه اهداف با تقدم پا یین درحال اجرا هستند بايد پاسخگوی اهداف با تقدم بالا باشيم و یک رفتار واحد از ربا ت پدیدار گردد • حسگرهای چندگانه: ربات دارای حسگرهای متعددی استكه خطا دارند ومعمولأ این حسگرها سبب بدست آمدن یک سری اطلاعات متناقض می شوند. باید بتوانيم تحت این شرایط تصمیم های مناسبی بگيريم 22/6
اهداف اصلی این تئوری : (ادامه) • پایداری : براي ساخت يك ربات مطمئن حتي اگربعضی از حسگرها ی آن یا بخشی ازسیستم ربات خرا ب شده باشد بايد اهداف خود را تطبيق دهد و اجرا كند–با معماري موازي لايه ها- • قابلیت تکامل: بدون اینکه تغیییر زیادی در ساختار ربات بدهیم بايد بتوانیم توانایی ها و قدرت آن را افزا یش دهیمو باید بتوانیم یک سری قابلیت های عملیاتی جدید را بدون اینکه نیاز به خطا یابی زیادی داشته باشد به آن اضافه کنیم 22/7
مدل معماري • لایه صفر: جلوگيري از تصادم با اشیای در حال حرکت یا ساکن • لایه 1: حركت بطور تصادفی بدون برخورد با اشیا • لایه 2: کشف دنیا با دیدن مکانها در فواصلی که به نظر قابل دسترس و هم جهت با ربات هستند • لايه 3 :ساختن نقشه محیط و plan مسیرها از مکانی به مکانهای دیگر • لايه 4 :توجه به استاتیک محیط • لايه 5 :کنکاش برای شناخت دنیا در قالب اشیاء مشخص وانجام اموری که بااشیاء خاص مرتبطند • لايه 6 : تنظیم و اجرای plan ها در مواردی که یک موقعیت محیط تغییر می کند • لايه 7 : کنکاش درباره رفتار اشیاء مختلف در جهان واصلاح plan مطابق با آنها 22/8
فرضهای هدفمند: • نداشتن یک مدل کلی از دنیا: سیستم سمبولیک در صورتی می تواند به درستی کار کند که تصویر واضح و روشن و بدون ابهامی از دنیا داشته باشد . بدست آوردن ا ین تصویر واضح و دقیق مستلزم انجام محاسبات پیچیده است که این عملیا ت پیچیده سیستم را کند می کند و در سیستم نویز ایجاد می کند .به دلیل وجود این نقاط ضعف بروکس فرضیه سیستم سمبولیک را به عنوان پایه هوش کنار گذاشت سیستم باید مشاهدات خود را بر پایه دنیای فیزیکی قرار دهد . در این فرضیه نمایش مرکزی از دنیا نداریم . بلکه بخشهای مختلف سیستم اطلاعات را از طریق حسگرها می گیرند و تمام هدف ها را به عنوان اعمال فیزیکی بدست می آورند 22/9
فرضهای هدفمند: (ادامه) • رفتارهای توزیع شده :عدم وجود بخش مركزي واينكه تمام رفتارها از یکپارچه سازی رفتارهای بدست آمده از کارها در بخشهای جداگانه ظاهر می شوند و موازي عمل مي كنند • سازماندهی عامل ها : هر عامل از عامل های لایه های پایین خود آگاهی ندارد.عاملی که در لایه خاصی قرار دارد اجازه ندارد به طور مستقیم در کار عامل های لایه بالا تر دخا لت کند و فقط می تواند رفتار آنها را به وسیله تغییر در خروجی و ورودی آنها تغییر دهد–با توجه به مدل معماری top-down or buttom-up - 22/10
لايه ها : • یک رفتار را به صورت یک بلوک در نظر می گیریم که تعدادی ورودی و خروجی دارد • هر رفتار در هر لحظه ورودی ها را چک می کند و بر اساس یک سری rule های ساده خروجی را تولید می کند • یک رفتار را به سطوحی از مهارت ها می شکنیم– لايه ها – • لایه های پایین می توانند لایه های بالاتر را کنترل کنند 22/11
دو قسمت كلي طرح : • Task accomplishing : یک کار بزرگ را به تعدادی عمل یا کار کوچک می شکنیم و از طریق ارتباط بین آنها تصمیم -گیری می کنیم .هر رفتار در داخل هر لایه به صورت یک ماشین متناهی ا لحالت نشان داده می شود • Firing simultaneously :ممکن است در یک وضعیت چند قانون که با هم در تناقض هستند بتوانند اجرا شوند.چگونه می توان این تناقض را حل کرد؟ 22/12
ارتباط بین لایه ها • ممکن است در یک وضعیتقسمت مقدم مربوط به چند قانون true شود • در روش Subsumption لایه های پایین می توانند لایه های بالاتر را کنترل کنند • لایه ها از طریق سیم ها به هم مر تبطند و از طریق سیگنالها به یکد یگر پیام می فرستند • برای ارتباط و تعامل دو لایه ( دو رفتار) دو حالت را در نظرميگيريم Inhibition,Supresion 22/13
مهار و سركوب: • Supresion (سركوب) : جلوی عبور یک سیگنال را می گیرد و سیگنال خودش را می فرستد • Inhibition (مهار) : جلوی عبور یک سیگنال را می گیرد و می تواند زماندار باشد 22/14
الگوريتم انتخاب عمل: 22/15
الگوريتم انتخاب عمل: عملی را به عنوان خروجی برمی گرداند که توسط لایه های زیرین مهار یا سرکوب نشده باشد اگر n تعداد رفتارها باشد زمان آنO(n2) است. 22/16
AFSM • (Augment Finite State Machine ) ماشين حالت متناهي تقويت شده • هر لايه در معماريبه عنوان شبکه ای از پیام ها و سیگنالها برای ا رسال به AFSM ها بکار می روند(هر لايه يك AFSMمخصوص دارد) • ذخيره شدن پيامها در رجيستر ها • قالب پیامها در ابزارهای معماری رباتهای متحرک , 8 بیتی هستند . در این نوع از شبکه ها هر ماشین متناهی الحالت بهبود یافته (AFSM) مجموعهای از رجیستر ها وتایمر ها ی هشدار دهنده است که به یک ماشین متناهی الحالت معمولی ( FSM ) متصل میشود 22/17
AFSM • FSM + تایمر داخلی • مهار و سركوب توسط ايجاد حلقه در سيگنال دريافتي 22/18
ارائه يك مثال • بلند کردن جسم توسط ربات 22/19
مزايا و معايب • معايب : • مزایا : • تصميم گيري برپايه اطلاعات محدود • نداشتن اطلاعات در مورد محيط درحالیکه عاملها نیاز به شناختن محیط محلی خود دارند • افزايش پيچدگي با زياد شدن رفتارها • لزوم داشتن تجربه درطراحي • مشكل بودن تقسيم لايه ها • رفتارگرايي • اجراي موازي • طراحي تقويتي و تكاملي • مقرون به صرفه • كارا و مطمئن چون لايه ها مستقلند • به كارگيري آسان 22/20
نتيجه گيري • شكسته شدن يك كار بزرگ به كارهاي كوچك و ساده شدن كنترل آن • انعطاف پذیري سيستم باعث می شود سرعت طراحي و كار افزایش یابد • حل رفتار های پیچیده در آن به سادگی امکان پذیر است • می توان بدون اینکه پایداری و تعامل این معماری از بین برود آنرا گسترش داد • معماری Subsumption برای ربات های ساده قابل انعطاف به خوبی کار می کند • هیچ نیازی نیست تا یک واحد مستقل ازاتصال های داخلی شبکه را برای تلفیق رفتار های سطح بالا در نظربگیریم ( عدم نياز به كنترلر مركزي ) 22/21
مراجع : SUBSUMPTION ARCHITECTURE FOR THE CONTROL OF ROBOTS Daniel Toal , Colin Flanagan , Caimin Jones and Bob Strunz A Robot That Walks :Emergent Behavior from a Carefully Evolved Network Brooks,R.A A Robust Layered Control System For A Mobile Robot Brooks,R.A 22/22
