Download
1 / 1
10 likes | 127 Views
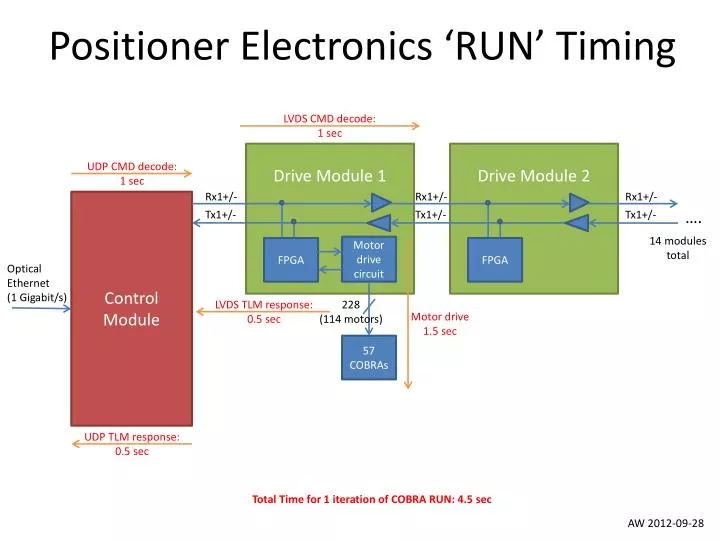
Positioner Electronics ‘RUN’ Timing. LVDS CMD decode: 1 sec. Drive Module 1. Drive Module 2. UDP CMD decode: 1 sec. Rx1+/-. Rx1+/-. Rx1+/-. Control Module. …. Tx1+/-. Tx1+/-. Tx1+/-. 14 modules total. Motor drive circuit. FPGA. FPGA. Optical Ethernet (1 Gigabit/s).

E N D
Positioner Electronics ‘RUN’ Timing LVDS CMD decode: 1 sec Drive Module 1 Drive Module 2 UDP CMD decode: 1 sec Rx1+/- Rx1+/- Rx1+/- Control Module …. Tx1+/- Tx1+/- Tx1+/- 14 modules total Motor drive circuit FPGA FPGA Optical Ethernet (1 Gigabit/s) LVDS TLM response: 0.5 sec 228 (114 motors) Motor drive 1.5 sec 57 COBRAs UDP TLM response: 0.5 sec Total Time for 1 iteration of COBRA RUN: 4.5 sec AW 2012-09-28