Download
1 / 28
320 likes | 541 Views
The Gaussian Sampling Strategy for Probalistic Roadmap Planners. Valdrie Boor, Mark H. Overmars, A. Frank van der Stappen, 1999 Wai Kok Hoong. Sampling a Point Uniformly at Random – A Recap. repeat sample a configuration q with a suitable sampling strategy if q is collision-free then

E N D
The Gaussian Sampling Strategy for Probalistic Roadmap Planners Valdrie Boor, Mark H. Overmars, A. Frank van der Stappen, 1999 Wai Kok Hoong NUS CS5247
Sampling a Point Uniformly at Random – A Recap repeat sample a configuration q with a suitable sampling strategy ifq is collision-free then add q to the roadmap R connect q to existing milestones returnR NUS CS5247
Sampling a Point Uniformly at Random – A Recap repeat sample a configuration q with a suitable sampling strategy ifq is collision-free then add q to the roadmap R connect q to existing milestones returnR NUS CS5247
The Gaussian Sampling Strategy for PRMs • Obstacle-sensitive strategy • Idea: Sample near the boundaries of the C-space obstacles with higher probability. • Rationale: The connectivity of free space is more difficult to capture near narrow passages than in wide-open area NUS CS5247
The Gaussian Sampling Strategy for PRMs • Random Sampler (about 13000 samples) • Gaussian Sampler (about 150 samples) NUS CS5247
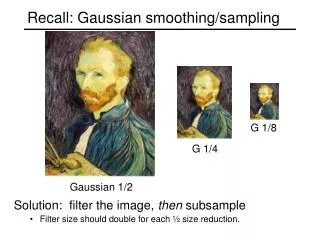
The Gaussian Sampling Strategy for PRMs • Adopts the idea of Gaussian Blurring in image processing. NUS CS5247
The Gaussian Sampling Strategy for PRMs • Algorithm NUS CS5247
The Gaussian Sampling Strategy for PRMs • Algorithm NUS CS5247
The Gaussian Sampling Strategy for PRMs • Algorithm NUS CS5247
The Gaussian Sampling Strategy for PRMs • Algorithm NUS CS5247
The Gaussian Sampling Strategy for PRMs • Algorithm NUS CS5247
The Gaussian Sampling Strategy for PRMs • Algorithm NUS CS5247
The Gaussian Sampling Strategy for PRMs • Algorithm NUS CS5247
The Gaussian Sampling Strategy for PRMs • Algorithm NUS CS5247
The Gaussian Sampling Strategy for PRMs • Algorithm NUS CS5247
The Gaussian Sampling Strategy for PRMs • Algorithm NUS CS5247
The Gaussian Sampling Strategy for PRMs • Algorithm NUS CS5247
The Gaussian Sampling Strategy for PRMs NUS CS5247
The Gaussian Sampling Strategy for PRMs • Pros • May lead to discovery of narrow passages or openings to narrow passages. • Cons • The algorithm dose not distinguish between open space boundaries and narrow passage boundaries. NUS CS5247
The Gaussian Sampling Strategy for PRMs • Extension • Use 3 samples instead of 2 • Gaussian Sampler (using pairs) • Gaussian Sampler (using triples) NUS CS5247
The Gaussian Sampling Strategy for PRMs – Experimental Results • Random sampler required about 13000 nodes. • Gaussian sampler required 150 nodes. • Random sampler took about 60 times longer than the Gaussian sampler. NUS CS5247
The Gaussian Sampling Strategy for PRMs – Experimental Results • A scene requiring a difficult twist of the robot. • Random sampler required about 10000 nodes. • Gaussian sampler required 750 nodes. • Random sampler took about 13 times longer than the Gaussian sampler. NUS CS5247
The Gaussian Sampling Strategy for PRMs – Experimental Results • A scene with 5000 obstacles. • Random sampler required over 450 nodes. • Gaussian sampler required about 85 nodes. • Random sampler took about 4 times longer than the Gaussian sampler. NUS CS5247
The Gaussian Sampling Strategy for PRMs – Experimental Results • Running time of algorithm increases when sigma is chosen to be very small because hard to find a pair of nodes that generates a successful sample, thus performance deterioration. • When sigma is chosen to be very large, output of sampler started to approximate random sampling, thus performance also deteriorated. • Choose sigma such that most configurations lie at a distance of at most the length of the robot from the obstacles. NUS CS5247
The Bridge Test for Sampling Narrow Passages with PRMs • Narrow-passage strategy • Rationale: Finding the connectivity of the free space through narrow passage is the only hard problem. NUS CS5247
The Bridge Test for Sampling Narrow Passages with PRMs • The bridge test most likely yields a high rejection rate of configurations • It generally results in a smaller number of milestones, hence fewer connections to be tested • Since testing connections is costly, there can be significant computational gain NUS CS5247
Comparison between Gaussian Sampling and Bridge Test Gaussian Sampling Bridge Test NUS CS5247
Summary • Sample near the boundaries of the C-space obstacles • The connectivity of free space is more difficult to capture near its narrow passages than in wide-open area • Random Sampler is faster in scenes where the obstacles are reasonably distributed with wide corridors. • Gaussian Sampler is faster in scenes where there is varying obstacle density, resulting in large open areas and small passages. ~ The End ~ NUS CS5247